FOC for BDC?
Forums:
- Read more about FOC for BDC?
- 11 comments
- Log in or register to post comments
Is there somewhere I can get old versions of VESC Tool? Specifically SW v0.83? I've got a new HW build that's currently running FW v3.30 but I don't want to upgrade the FW and the current VESC Tool SW v0.94 is refusing to connect properly.
Is there a particular reason as to why the VESC Tool can't connect? This is really going to be an issue as more people take the VESC firmware and make custom PCBs because I can guarantee that the config in the default firmware will be wrong.
I'm experiencing problems after upgrading my firmware to 3.102 using the latest vesc tool version.
Originally I was on fw 2.18 without any problems with the old BLDC tool - tried to put the same setup in the new vesc tool but I get bad detection..
I am trying for days now to get my remote to throttle the motor. The remote is paired to an Arduino and that outputs the PPM signal. I know this part works because I connected a servo instead of the VESC and that works flawless. But when I connect the VESC, nothing happens. There are no values that I can read from the app, and it also doesn´t start the motor. I connected GND and Signal from the VESC to GND and the PPM output pin from the Arduino. There are 10k Ohm resistors in both lines to avoid any current from going through.
Hi,
I have extracted:
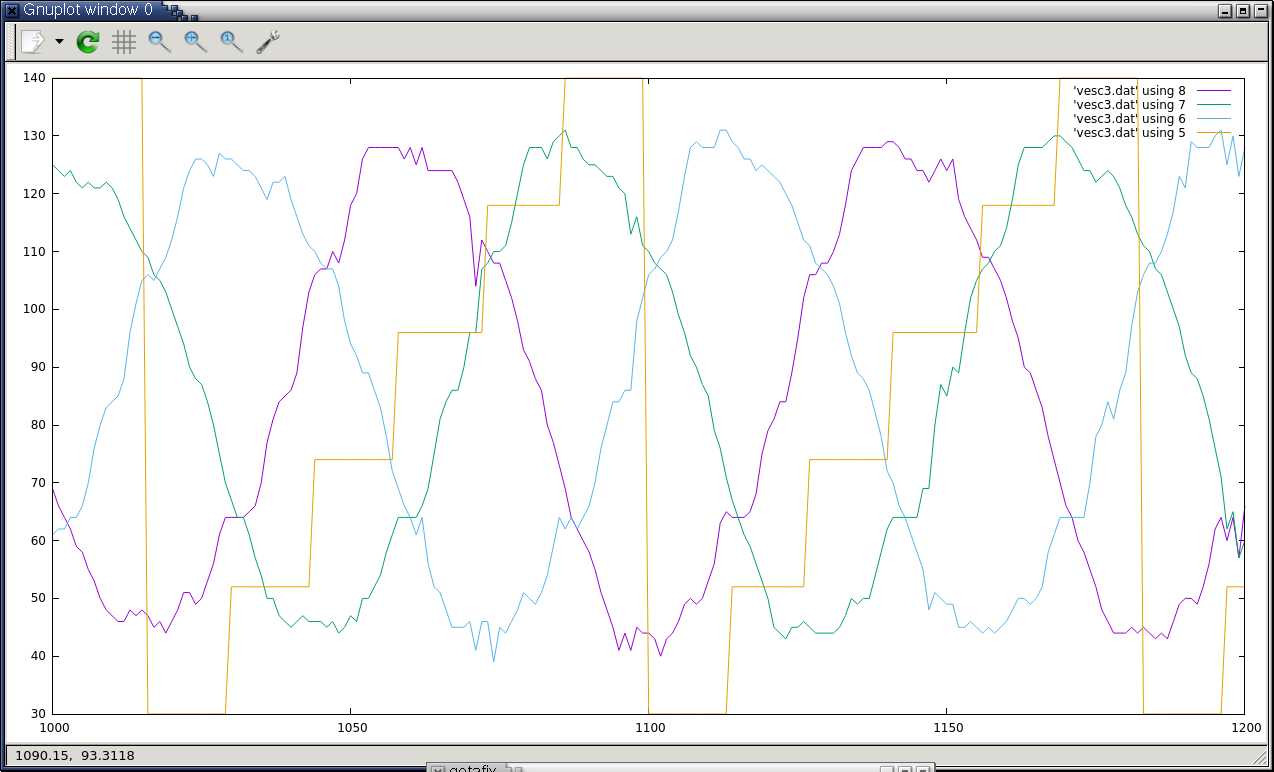
from my own VESC. Here we can see the positions where the hall sensor changes state.
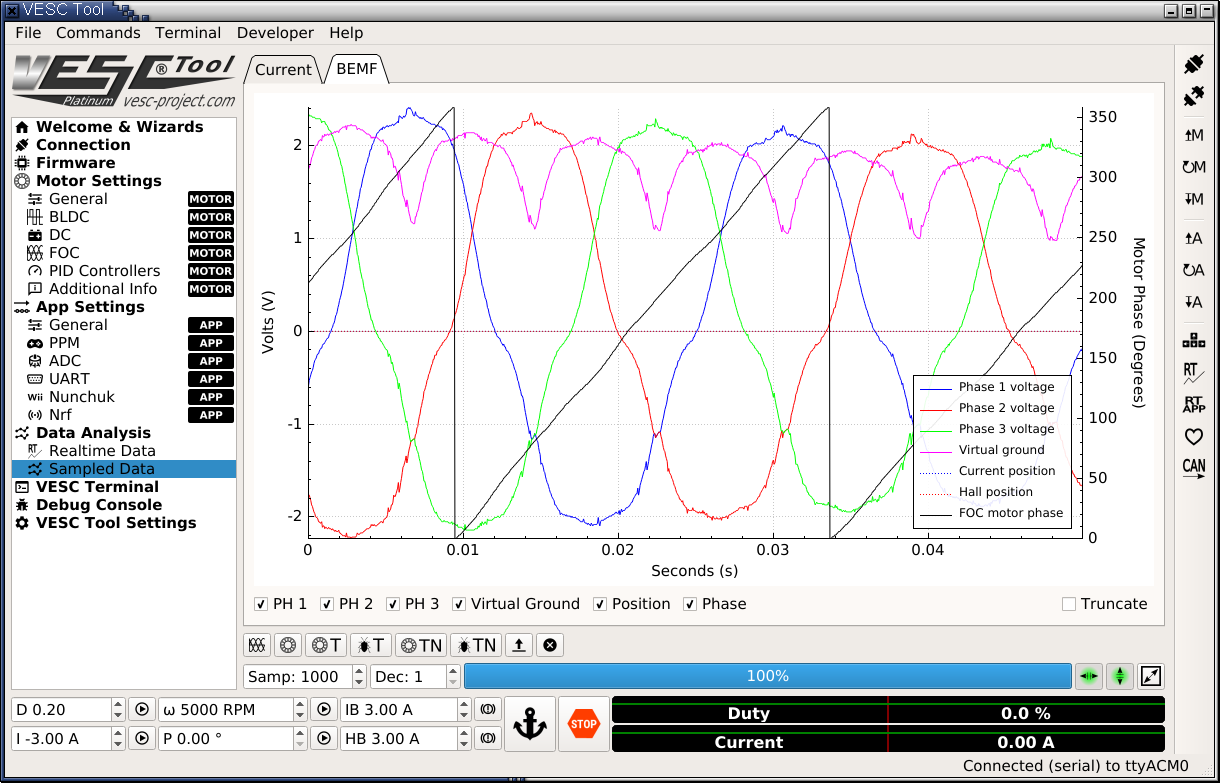
Now on the VESC6 I get:
Hello! I've been playing with a forked version of the vesc-tool and just found an easy way to add HM-10 compatibility alongside the NRF chip which is currently supported. The NRF chip is superior since it can operate at 115200 Baud and I find the HM-10 is stable only to 19200 Baud. I'd make this a pull request, but code is forked and now head is a few commits in front, also the changes are minimal so I'll just outline here. The key thing I found that made this easy was an AT command which creates adds a second characteristic to the HM-10 service UUID.
Hi everyone,
I apologize if this subject has been addressed before but I was wondering where do I go to read the fault or error codes of my VESC in the new VESC Tool?
I have been riding my e-board for about a total of two weeks now and all of a sudden my motor will not spin when I pull my remotes throttle. The VESC is flashing a red LED three times every time I pull the throttle and from what I have looked up online it seems there is some fault code that my VESC is producing and thus my VESC is stopping the motor from running.
I am working on my motor controller.... Suddenly I get "inappropriate ioctl for device" when pointing vesc_tool at my VESC device. I strace-ed vesc tool and:
open("/dev/ttyACM0", O_RDWR|O_NOCTTY|O_NONBLOCK|O_CLOEXEC) = 13
fcntl(13, F_SETFD, FD_CLOEXEC) = 0
ioctl(13, TIOCEXCL) = -1 ENOTTY (Inappropriate ioctl for device)...
ioctl(13, TCGETS, 0x7ffc165712a0) = -1 ENOTTY (Inappropriate ioctl for device)
The reported frequency of a signal varies PWM frequency and sampling mode. Is this a bug?
How to reproduce:
Hi,
Somehow my hardware measures "R= 0.00". To try and figure out what is going on I'd like to run the lambda detection. But this is blocked due to the R=0....
How Do I get past this?
.