Windows application
Forums:
- Read more about Windows application
- Log in or register to post comments
Hi,
Can someone tell me what are the differences between the windows SW ?
Silver, Bronze, Gold, Platinum ?
Are there different features ? - motor detection? or other differences ?
thanks,
Roee
Hy guys, i have a vesc 4.20 connected to a 1200kv 4 pole in bldc mode sensorless powered at 12S. This motor has a low inductance. Could someone tell me how to set esc for rc application? Thank you very much
Hello.
We use a 5065 BLDC Hall sensored motor having low KV (70KV) with 2x12V lead batteries. We successfully processed the wizard to configure the VESC. Motor absolute max current is set to 150A and it is configured for 50A max current : the motor can support it. The motor turns with small load (8A) using VESC Tool at 50A (!?).
When putting increased load, we notice that the current goes up to 13A and then decrease down to 0 depending on the torque applied against the motor. We don't undestand why.
Hi ... Im new to VESC. I typed up a long story only to lose it before posting so Im likely to be a bit short here.
I have a recently purchased VESC 6.6 from FlipSky that appears to be limited on eRPM to 40600 even with lots of changes.
The motors are 6384. I have a large bank of 96 BAE A123 batteries. It shows 39.4 volts in the VESC tool.
I bought about everything from FlipSky new. Im running a VX1v6 remote.
The VESC tool was downloaded just a week or so ago. It say 3.00 on the filename.
Hello,
I am facing an scenario where I am using a receiver/pot to control the speed of the motor. When the ADC is put to zero, the motor stops and the brakes are enabled. this is consuming some current. I am trying to disable the brakes so that the motor will be free to move as it is before powering the motor. I am also trying to do that to reduce the current consumption(for braking).
Is there a way I could disable in the app or the code? Can you point me in the place where in the code i can disable that?
Thanks!
Hey,
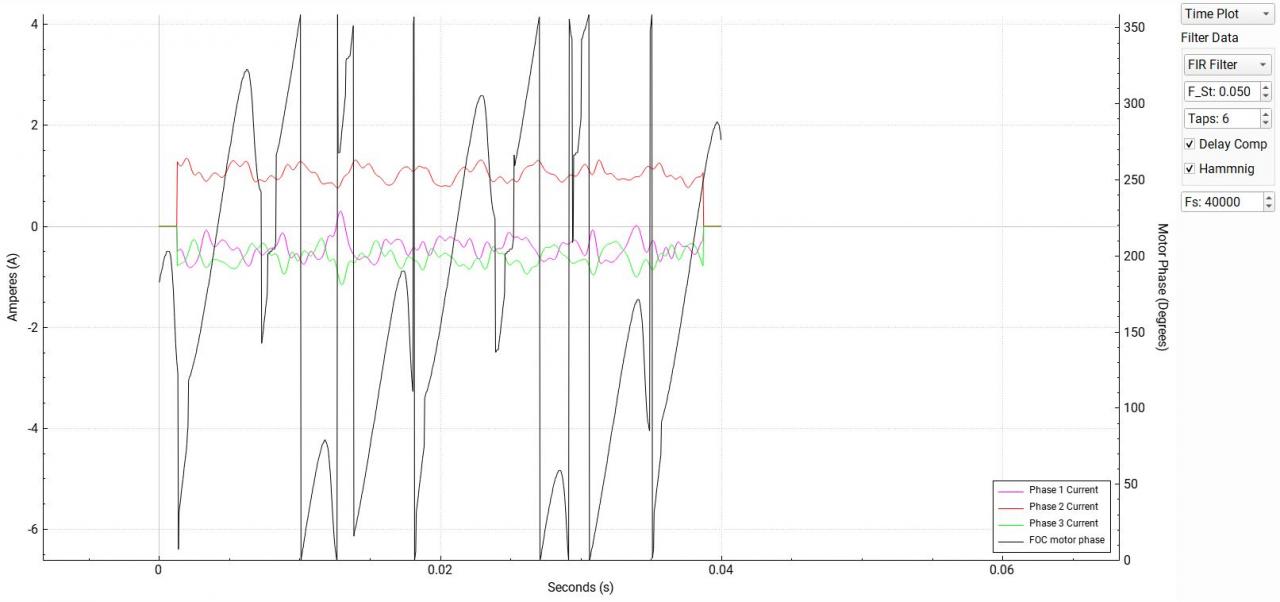
Can somebody briefly explain me how VESC observer works in FOC mode.
The problem: everything works great when motor is driven. But when freewheeling the observer goes crazy.
Graphs look nice when driven and observer works correctly based on current, but when freewheeling graphs look like that: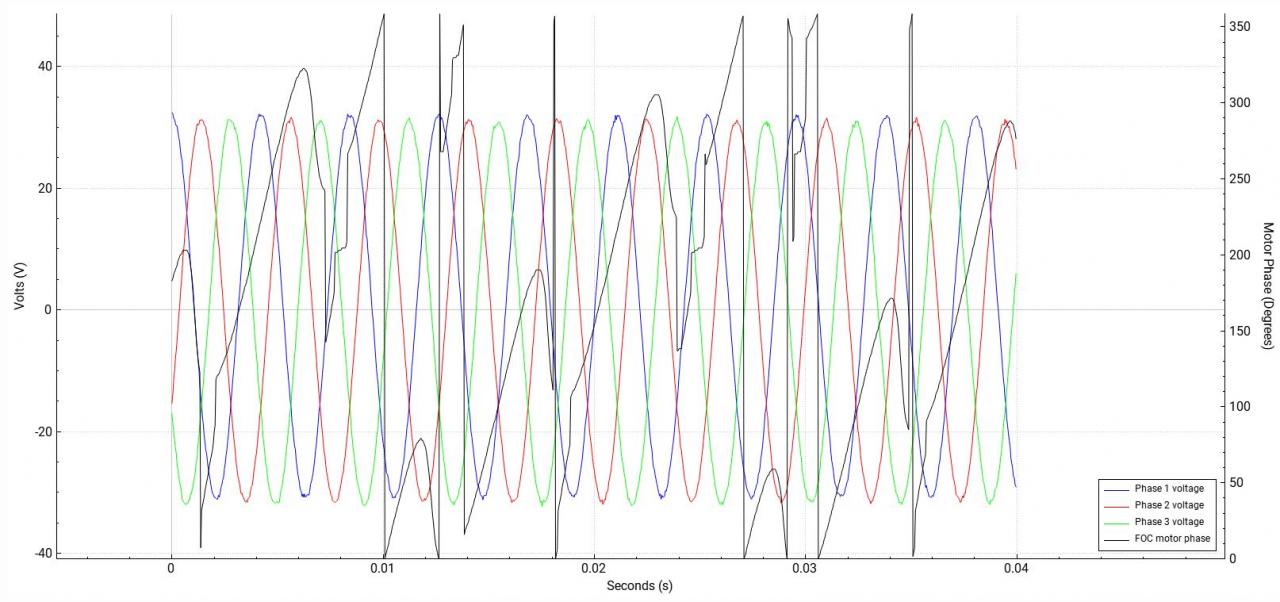
Hey guys,
I am making a vesc four-wheel-robot. Use arduino mega 2560 as low-level controller and Raspberry Pi as high-level board. Arduino board has a magnet sensor to sense magnet signal, uses low level trigger interrupt .
When I test , I found that When the car reaches faster (vesc duty 0.1) , the arduino pin work affected . Not sense magnet but pin has low level signal. I tried use 10K pull-up resistor and triode,it works a little bit well than before , but when speed upper error detection still occurs.
Can anyone give some tips?
Dear all,
is it possible to rotate the motor in reverse direction with the foc_openloop or foc_openloop_duty commands?
I get "Invalid argument(s)." response for "foc_openloop [current] -[erpm]" command.
Thanks in advance
/Ágoston