Can you try with a slower time constant and setting f_sw to 30 kHz? I think 200 uS was at the limit of working for me at 25 kHz, 30 was a bit better.
I also noticed that the full brake button will not ramp down the current nearly as fast as commanding a negative current. That is because it uses duty cycle mode with a somewhat careful pi controller in addition that ramps the current down before limiting the duty cycle. You can try using the current brake button with the full current.
Ok tried with 1000us max I see is 21.8v now, and no weird things happen when I do full brake. Seems stable down to about 500us then it starts having the problem.
No resolution after selecting reboot from the terminal menu multiple times. (Is this command be silent? I don't see any messages indicating success.)
I've been able to provoke the issue with only throttle. It seems to be dependent on the battery current limit. With 100 amps motor 50 amps battery, I see the issue on the first aggressive throttle signal. With 100 amps motor 30 amps battery, I couldn't get the issue to show up after 4-5 throttle attempts.
Reboot is silent, but it should disconnect and reboot. You can try the uptime command in the terminal after to see if it was just reset.
If reboot does not work it sounds like a hardware issue to me. Not sure what it can be though, have never seen something like this. I also had a look at the log and can't tell what happened.
Has this been a problem before, ot did it start with one of the 5.3 firmwares?
Yes, the reboot evidence points towards hardware. A hardware issue is also consistent with my observations that occasionally a quick power cycle didn't fix.
I tried to downgrade to 5.2 to test and bricked the Raiden 7. This may remain a mystery for a while since Raiden 7 doesn't break out the SWD port and I don't have pogo pins and a fixture to use the internal pads.
I also have a Flipsky 7550 that I'd like to test, but that hardware isn't working with 5.3 yet even though it says it uses an unmodified 75_300 config file.
I'll have an ENNOID unit in about a week, and I'll look closely for the issue again when I bring up that controller.
Good afternoon. Testing the weakening of the magnetic field. When this option is enabled, the engine continues to
turn the shaft even when the throttle stick is reset to zero. How to remove this delay ? Attached a photo.
FW current =30 a
FW start = 90%
FW ramp time = 0
Q Axis Current Factor = 2.0 %
When running field weakening the motor must be driven with D-axis current until the speed goes below the field weakening region. Otherwise it can cause a very hard brake and possibly blow up the controller. If there is load on the motor this should become less noticeable.
How does one download the 5.03 beta firmware to test? The link on the first page does not work. I wanna use this firmware to test and see if it will let my UBOX V2 work with my 6354 motors. Currently on 5.02 under any harsh load the motor screams and locks up. But on the bench it spins up fine.
Hey, i got a message that my motor got saliency and it recommends checking out MTPA. And that info box says that it is only recommended if i know what i am doing. And that is where the problem starts, Could i get some help with that? or some tips
I updated ble NRF modul Trampa with firmware through swd vesc tool 3.01, nrf52840_vesc_ble_rx26_tx25_led27 noticed that the Trampa Wand remote control only works when the phone is connected via Bluetooth to VESC.
As soon as you turn off the bluetooth in the phone, the remote stops working, please check and fix.
do you still have this beta version vesc_tool_test_2022-01-12.zip , i can change to new release firmware becaus i'm still in the beta version, so i need beta tools to set motor parameter to default
I always get this error when I want to change the firmware, so I need the previous version of the tools and read the default motor config to be able to upload the firmware, this happened because I set my min current setting at 0A.
Do you mean that you set cc_min_current? Yes, that makes sense then as it won't be able to stop the motor timer before doing flash operations then. I can also see that you have beta 76, which is not compatible with beta78.
I will fix the next version so that updating the firmware works even when cc_min_current is 0.
I don't have that version of vesc tool around anymore unfortunately. Maybe someone else does? If you can't get an swd programmer and noone has that vesc tool version you have to go back in the git history and compile vesc tool with support for that firmware.
this also affects when writing motor config, after reboot the setting is not saved,
so after setting the motor/app min current must be set to 0.05A then write confing, and set back to 0A and write again and it will save the configuration.
still error when uploading firmware and i lost my st-link, so the solution is to find the correct beta version, but i use windows and i don't know how to build the vesc tools.
After updating VESC 6MKV from 5.2 to 5.3 I noticed that BLDC that I am driving uses higher winding currents than before. I have a BLDC with propeller, before upgrade it consumes 22-23 A at full speed, now it consumes 36-37 A (measured with current clips). After all, input power at power supply didn't increase a lot.
I can not say that this is an issue because motor runs and it doesn't overheat, but it is something I noticed.
I uploaded this and it reads beta 65 in the firmware tab. I was still able to get into this "whine mode". Output from foc_state below.
I have a j-link that I could get going, would it be useful to dump a section of memory?
Mod d: -0.00
Mod q: 0.00
Mod q flt: 0.00
Duty: 0.00
Vd: -0.00
Vq: 0.00
Phase: 0.72
V_alpha: 0.00
V_beta: 0.00
id: 0.00
iq: 0.00
id_filter: 0.00
iq_filter: 0.00
id_target: 0.00
iq_target: 0.00
i_abs: 0.00
i_abs_flt: 0.00
Obs_x1: -0.02
Obs_x2: 0.02
vd_int: -0.00
vq_int: 0.00
off_delay: 0.00
Does it work to run reboot from the terminal menu, or do you have to power cycle?
Ok tried with 1000us max I see is 21.8v now, and no weird things happen when I do full brake. Seems stable down to about 500us then it starts having the problem.
No resolution after selecting reboot from the terminal menu multiple times. (Is this command be silent? I don't see any messages indicating success.)
I've been able to provoke the issue with only throttle. It seems to be dependent on the battery current limit. With 100 amps motor 50 amps battery, I see the issue on the first aggressive throttle signal. With 100 amps motor 30 amps battery, I couldn't get the issue to show up after 4-5 throttle attempts.
Here is a log as the controller enters the whine mode under throttle: https://gist.github.com/dsoto/7def65d6376c2d7fbf833ff1a2ad3f97
Edit: this should be replying to #153.
Reboot is silent, but it should disconnect and reboot. You can try the uptime command in the terminal after to see if it was just reset.
If reboot does not work it sounds like a hardware issue to me. Not sure what it can be though, have never seen something like this. I also had a look at the log and can't tell what happened.
Has this been a problem before, ot did it start with one of the 5.3 firmwares?
Yes, the reboot evidence points towards hardware. A hardware issue is also consistent with my observations that occasionally a quick power cycle didn't fix.
I tried to downgrade to 5.2 to test and bricked the Raiden 7. This may remain a mystery for a while since Raiden 7 doesn't break out the SWD port and I don't have pogo pins and a fixture to use the internal pads.
I also have a Flipsky 7550 that I'd like to test, but that hardware isn't working with 5.3 yet even though it says it uses an unmodified 75_300 config file.
I'll have an ENNOID unit in about a week, and I'll look closely for the issue again when I bring up that controller.
Good afternoon. Testing the weakening of the magnetic field. When this option is enabled, the engine continues to
turn the shaft even when the throttle stick is reset to zero. How to remove this delay ? Attached a photo.
FW current =30 a
FW start = 90%
FW ramp time = 0
Q Axis Current Factor = 2.0 %
When running field weakening the motor must be driven with D-axis current until the speed goes below the field weakening region. Otherwise it can cause a very hard brake and possibly blow up the controller. If there is load on the motor this should become less noticeable.
Thanks, Вenjamin. I'll try cycling under load. It's still a strange situation, but can the exit from the field weakening mode still be made faster?
How does one download the 5.03 beta firmware to test? The link on the first page does not work. I wanna use this firmware to test and see if it will let my UBOX V2 work with my 6354 motors. Currently on 5.02 under any harsh load the motor screams and locks up. But on the bench it spins up fine.
If you are using Chrome, you have to copy the link in a new tab and then press enter, it starts download for some reason.
New VESC_TOOL V3.01 seems not to run, it complains for a OPENGL driver, try to run the .exe on win10 & win11:
SOLVED, installed new OpenGL driver
5min shutoff time didn't work (vesc stay to infinity on) on my vesc 6 mkiv when i set 10min or 30 min its ok.
Except that everything else work quite nice on both my vesc 6 mkiv and flipsky 6 mini dual.
VSS mode is really good improvement for me.
Thank for your hard work Benjamine!!!
Same good vibe,
Thank you Benjamin!
John
Hey, i got a message that my motor got saliency and it recommends checking out MTPA. And that info box says that it is only recommended if i know what i am doing. And that is where the problem starts, Could i get some help with that? or some tips
Hello Benjamin.
I updated ble NRF modul Trampa with firmware through swd vesc tool 3.01, nrf52840_vesc_ble_rx26_tx25_led27 noticed that the Trampa Wand remote control only works when the phone is connected via Bluetooth to VESC.
As soon as you turn off the bluetooth in the phone, the remote stops working, please check and fix.
Firmware for ble NRF from version 3.0 works.
nrf52840_vesc_ble_rx26_tx25_led27
Thanks.
You are correct, there is a bug in that NRF firmware. Fix on the way.
Should be fixed now. Can you download vesc tool again and give it a try?
do you still have this beta version vesc_tool_test_2022-01-12.zip , i can change to new release firmware becaus i'm still in the beta version, so i need beta tools to set motor parameter to default
That beta should be compatible with the release (I think), it will just give you a warning.
an error occurred when I tried to upload the firmware,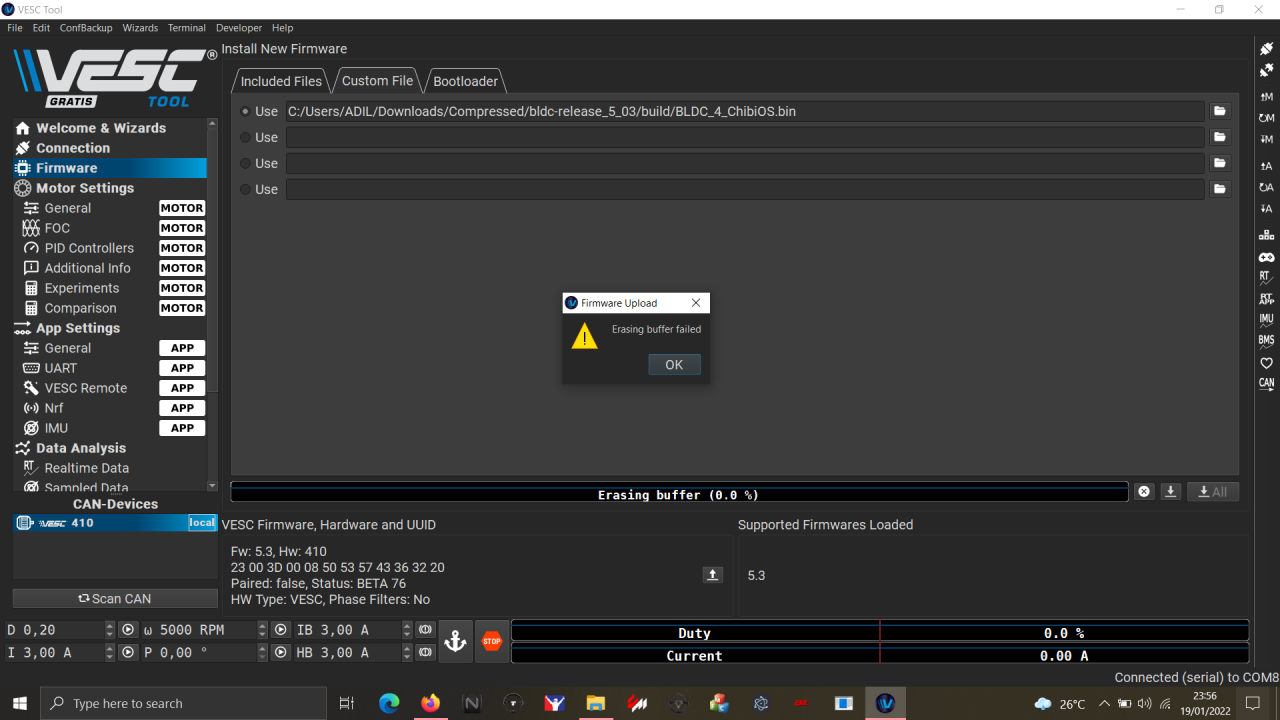
I always get this error when I want to change the firmware, so I need the previous version of the tools and read the default motor config to be able to upload the firmware, this happened because I set my min current setting at 0A.
and i use vesc 4.20 from flipsky with r-shunt R005
can you try with the included files first?
same error
and i cant read and write motor config
Do you mean that you set cc_min_current? Yes, that makes sense then as it won't be able to stop the motor timer before doing flash operations then. I can also see that you have beta 76, which is not compatible with beta78.
I will fix the next version so that updating the firmware works even when cc_min_current is 0.
I don't have that version of vesc tool around anymore unfortunately. Maybe someone else does? If you can't get an swd programmer and noone has that vesc tool version you have to go back in the git history and compile vesc tool with support for that firmware.
yes this one,
this also affects when writing motor config, after reboot the setting is not saved,
so after setting the motor/app min current must be set to 0.05A then write confing, and set back to 0A and write again and it will save the configuration.
ok i will try to use st-link
Just fixed this in beta 6.
Yes, I will check and report the work, thanks!
Yes, I will check and report the work, thanks!
Many thanks to Benjamin!
The module has started working!
still error when uploading firmware and i lost my st-link, so the solution is to find the correct beta version, but i use windows and i don't know how to build the vesc tools.
It you have another vesc you can also use it as an swd progremmer.
problem solved
We can not get our AS5047 encoder to be detected by the ESC6.12 with Firmware 5.3.
We tried using Hall Sensor, ABI encoder and the "AS5047 Encoder" setting according to the available instructions online.
The picture below is while using the ABI encoder and the only graph that is not flatlining.
Also the motor stops moving while sending circa 3 Amperes after a while. (see the video below)
https://www.youtube.com/shorts/6ZSx-NdTUHU
After updating VESC 6MKV from 5.2 to 5.3 I noticed that BLDC that I am driving uses higher winding currents than before. I have a BLDC with propeller, before upgrade it consumes 22-23 A at full speed, now it consumes 36-37 A (measured with current clips). After all, input power at power supply didn't increase a lot.
I can not say that this is an issue because motor runs and it doesn't overheat, but it is something I noticed.
Thank you for telling me about this. I'm happy to find this wonderful article. pla hurdle game free
Pages