what is HFI in the VESC?
Forums:
Confused what HFI stands for. Is this a different form of the FOC or an open-loop function for tuning?
- Read more about what is HFI in the VESC?
- 2 comments
- Log in or register to post comments
Confused what HFI stands for. Is this a different form of the FOC or an open-loop function for tuning?
which source code files execute the calibration. we have a motor that is difficult to calibrate at high voltage. I was wondering what the current filtering looked like and the algorithm, so many it can be tweaked to be more robust for our application.
Trampa 100/250 with one old brushed DC motor....how can i change the motor spin direction????plz help!!!
Hello,
Currently there are some source and header files stored in the root folder. There are also other type of files. It looks a little disordered. Please see the screenshot below.
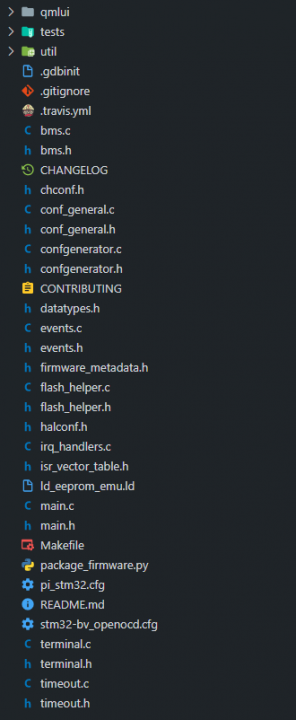
I'm going to do some clean work so that these *.c and *.h file could be stored in a folder. Which folder do you recommend? Is it ok to move these files to applications folder?
I am communicating with vesc on can and receiving status messages but don't need all 1-5. is there an easy way to change it to send only 1 and 5?
Hi,
I'm currently building something to power my snowboard on the flat. The ESC that I have had to be compatible with the motor I needed from a particular company, so it's proprietary to their motor (the company is not related in any way to skateboards).
I'm looking to not re-invent the wheel when it comes to controlling the ESC and skateboard remotes look like a great option. Is there any way these remotes can be used to control ESCs other than VESC, Hobbywing and YingLis?
Thanks in advance for any tips.
peter
Hi. I see BLDC delay mode is described in VESC Tool as the algoritm used for standard RC ESCs. I also understand it the way that some or all parameter recognition routines use this mode.
However, I am unable to successfully tune this and use it since I don't understand quite which parameters I need to set and adjust to make it work. Any tips are welcome.
Using 2x Rion Tronic 250/ Focer3.1 esc over CAN for a scooter project. Traction control enabled (for the front wheel, set to 2000erpm diff). It works perfectly fine unless the surface is very slippery. If the surface is very slippery and the throttle gets applied too fast, both ESC will cut power to zero producing a massive power spike in the rear wheel ESC resulting in a massive explosion. Any idea why the power cut is happening? Unfortunately did not get log files. The battery pack was a 20s6p Molicel P42A.
Hi Guys
I'm desinging sensored BLDC motor driver. Motor driver voltage 48V, current 20 amp, sensored drive.
Components
Mosfets 75nf75
Gate Driver ucc27211
Hello, I am tuning my HFI parameters for the Start voltage specifically, and I noticed that up to a certain point the FFT Phase Bin2 values stop improving once Start Voltage reaches a certain point.
I am running a 5010 360kV pancake drone motor at around 11.3v. Ths motor has very good Lq-Ld (around 50% of total inductance at 20% duty)
Is there any way to predict what voltage a particular motor would require for it to saturate based on known FOC detection params?
Thanks, Jordan