Raptor 2
Forums:
Can I use the vesc tool on my raptor 2 to update the firmware and alter the settings
- Read more about Raptor 2
- 2 comments
- Log in or register to post comments
Can I use the vesc tool on my raptor 2 to update the firmware and alter the settings
I am running 3.5 turn QS Hub motor in 16 inch moto wheel and was wondering what would go wrong if I will have ves similar to 75/300 for it?
Anyone tried yet?
Would it be possible to run at 100-120 battery amps constant?
Is it possible to use the WAND remote with other non-Trampa boards too, e.g. Evolve Carbon GTR?
I was curious if alternate IMU devices could be easily made compatible. The MPU-9250 seems to have limited stock at some distributors. Would something like the Bosch bmi160 be a decent substitute?
Where can I find updated schematics for the VESC 4.20 version?
Hi everyone,
I'm using an Analog Throttle/Brake for an electric scooter that I am using VESC on. The problem is that -- ADC2 does NOT cut power to the throttle (ADC1 is hooked up to the signal wire of the throttle, ADC 2 is hooked up to the signal wire of the brake). If I hold BOTH the throttle and the brake, the motor still runs at full speed. What am I doing wrong? I did the calibration and have ADC1 voltage set to min 0.83v, max 3.3v, center voltage 2v. and ADC2 is set at 0.85v, 3.30v max.
After replacing the MOSFET s on my VESC 75/300 ., the USB communication with the host system started to act flaky and had to retouch all the pins on the microcontroller to eliminate any loose connections ., this lands me in the current situation where the STM32 microcontroller keeps resetting every 2 seconds with a blink on both the [strong] Red and [faint]Green LED's ., the USB communication is not established as the window of reset is too small.
Hi,
I'm trying to hook hall sensors up to a unsensored BLDC motor (6374 SK3 149KV).
The signals are ok (between 1.1V to 3.5V with a 5V power supply) but no way to pass the sensors detection in both BLDC and FOC modes.
The signals look like this (turning the motor by hand) :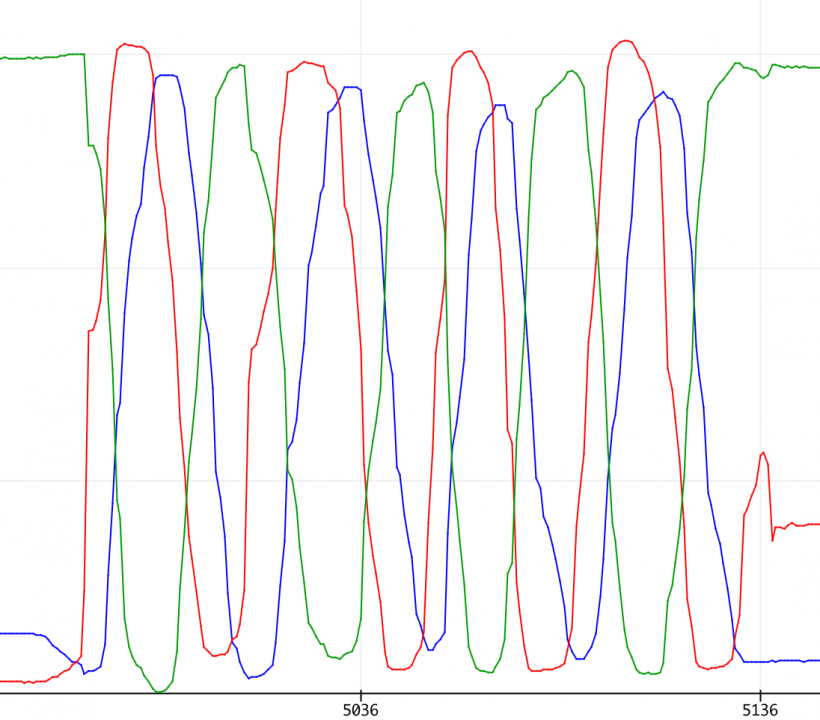
We can see that the "blue" sensor is a bit shifted.
Hi everyone - i hope someone has some input on what to do here,
I seem to have some issues running cruise control w/ dual-VESC 6 and the new Wand!
Is there an second uart that we can somehow access? Would be awesome to be able to control lights and other things through the vesc