Hello again,
I thought I posted this earlier, but it doesn't seem to have posted. Sorry if it is a repeat.
Can anyone post more info on how to select the FOC detection parameters? How would I select the current, duty cycle, open loop speed delay and time constant for a given motor. How do these relate to traditional motor parameters like Kv, rated torque, etc.
The first motor I tested went very well and the ESC was super quiet when running the motor after setup. For the second motor I tested (Tmotor u8ii kv190 http://store-en.tmotor.com/goods.php?id=468), the motor was jerky no matter what settings I used when detecting. I was able to finally find a combination where it seemed to get up to a decent speed and successful measurements, but it was still noisy. When I added a prop to the motor, the ESC was much louder than with the first motor.
I have uploaded the settings I used and what the wizard measured. Thank you
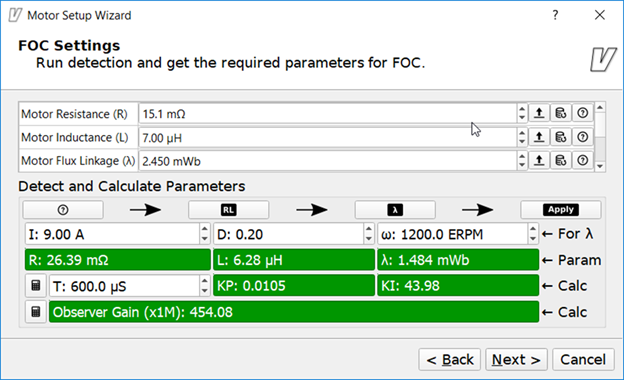
You can try playing with the resistance and inductance. Also try changing the time constant (the 600uS in your picture).
If its having difficulty tracking try adding some D Current injection in the advanced tab.
A video showing what it is doing would help to give better advice.
Which direction would you recommend adjusting the resistance, inductance, time constant, etc? Can they be roughly estimated from motor specs, or is it best just to guess and see how it goes.
The datasheet says the resistance should be 48mOhms, but one of Benjamin's videos said this tool would measure half of that, so 26.3mOhms seems like it could be correct if you add lead resistance to the measurement.
http://store-en.tmotor.com/goods.php?id=468
Just increase or decrease each one in turn until it seems to run best then move to the next parameter.
Resistance is most important, if its too far off nothing will happen. Try between 15mOhm and 35mOhm
Inductance lets you tune it a bit more. Try between like 4uH and 20uH.
The time constant can be adjusted from like 100uS to 2000uS, bigger values should make it less twitchy.
Thanks for the info. I'll keep playing around with the parameters and let you know what seems to work. Reducing the current max during the settings wizard seems to help. I'm now testing another Hacker Q80 13XS motor (link below) that starts and runs well 90% of the time, buit 10% of the time it either cogs or runs slowly backwards and takes a bunch of current. Any idea how to prevent this, or which parameters might affect this most?
I am guessing open loop ERPM might play a big part. Do you know what a typical value for that would be for a 14 pole pair motor?
https://www.hacker-motor-shop.com/Brushless-Motors/Hacker-Outrunner/Hacker-Q80/Q80-13XS-F3A.htm?shop=hacker_e&SessionId=&a=article&ProdNr=38798013&p=2986)
where can i get the video?
吴谢
Hi, I am struggling trying to detect the parameters for the T-Motor MN2212-21. After doing several R & L detection I converge between R = 54mOhm and L = 3.75uH. But for the flux linkage 'lamba' and the KP and KI, they change according to the variation of I, D, w and T.
Do you have any recommendation?
Thanks,
Alex
What are you using for I, D, w and T? Does it the motor spin with the parameters measured with the default detect values? Some helpful advice I received was to lower the max current during detection (20-10A seemed to make it work more often).
please help im pulling my hair out i cant open the set up wizards
david pringle