Hey guys,
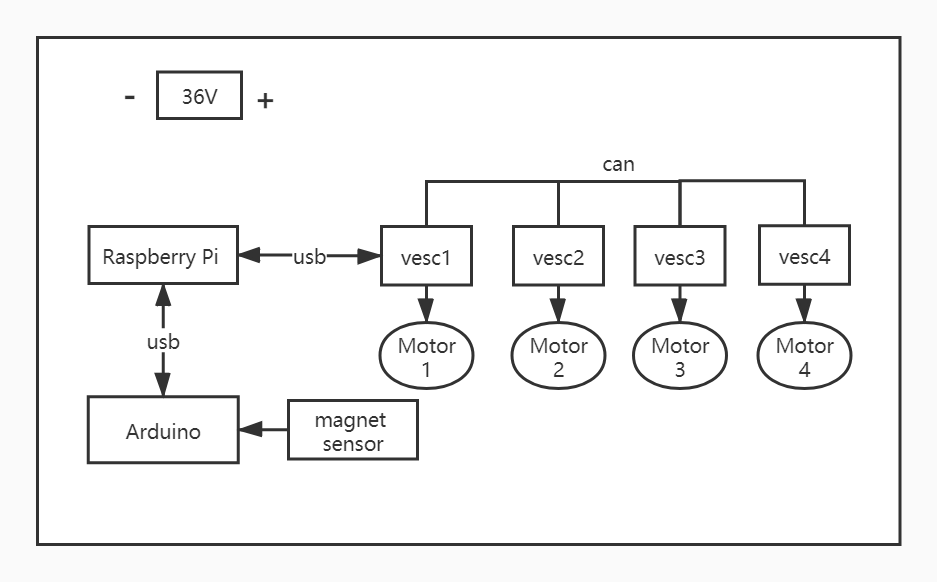
I am making a vesc four-wheel-robot. Use arduino mega 2560 as low-level controller and Raspberry Pi as high-level board. Arduino board has a magnet sensor to sense magnet signal, uses low level trigger interrupt .
When I test , I found that When the car reaches faster (vesc duty 0.1) , the arduino pin work affected . Not sense magnet but pin has low level signal. I tried use 10K pull-up resistor and triode,it works a little bit well than before , but when speed upper error detection still occurs.
Can anyone give some tips?
How do you power the sensor? Is the sensor on the Arduino board? If so, I would move the sensor off the board and keep Arduino away from the motor to minimize interference from the motor. For the interrupt to work, you may want to add a 0.1uF cap signal to the ground to control noise.
NextGen FOC High voltage 144v/34s, 30kw (https://vesc-project.com/node/1477)
vadicus, thank your reply . The magnet sensor's power is 1~3W(DC 10-30V ,current 100mA). I use main 36V battery and two power buck module give sensor power(3V 400mA) and Arduino(12V). I will try your cap suggest.
. The magnet sensor's power is 1~3W(DC 10-30V ,current 100mA). I use main 36V battery and two power buck module give sensor power(3V 400mA) and Arduino(12V). I will try your cap suggest.
Nice project, my brother is a specialst too, he was trying to find a resume. service to get a well-paid job. He tried these guys topresumewritingservices.com and now he can prove that this is the best resume service online