After using way too much time figuring out how the VESC can status messages function, I decided to share it :)
Found it in the can.c code https://github.com/vedderb/bldc/blob/master/comm_can.
|
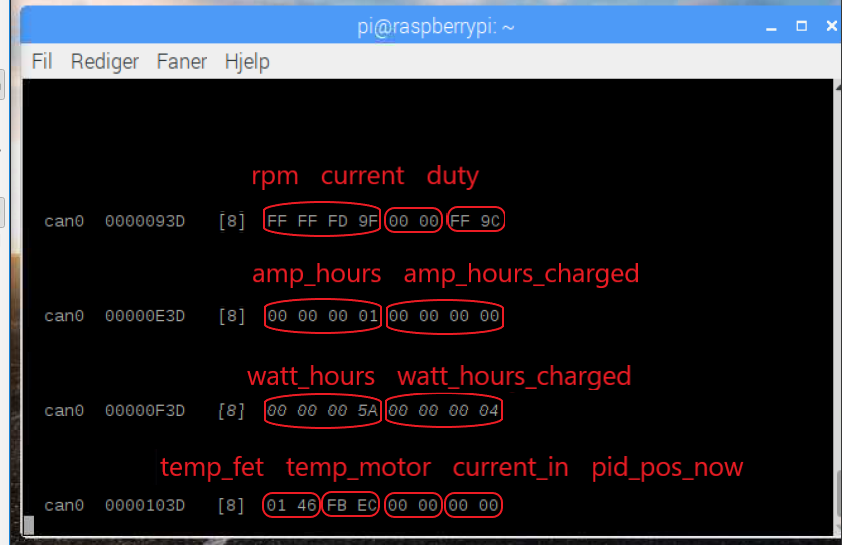
CAN_STATUS_1 for (int i = 0;i < CAN_STATUS_MSGS_TO_STORE;i++) { can_status_msg *stat_tmp = &stat_msgs[i]; if (stat_tmp->id == id || stat_tmp->id == -1) { ind = 0; stat_tmp->id = id; stat_tmp->rx_time = chVTGetSystemTime(); stat_tmp->rpm = (float)buffer_get_int32(rxmsg.data8, &ind); stat_tmp->current = (float)buffer_get_int16(rxmsg.data8, &ind) / 10.0; stat_tmp->duty = (float)buffer_get_int16(rxmsg.data8, &ind) / 1000.0; break;
|
CAN_STATUS_2
for (int i = 0;i < CAN_STATUS_MSGS_TO_STORE;i++) { can_status_msg_2 *stat_tmp_2 = &stat_msgs_2[i]; if (stat_tmp_2->id == id || stat_tmp_2->id == -1) { ind = 0; stat_tmp_2->id = id; stat_tmp_2->rx_time = chVTGetSystemTime(); stat_tmp_2->amp_hours = (float)buffer_get_int32(rxmsg.data8, &ind) / 1e4; stat_tmp_2->amp_hours_charged = (float)buffer_get_int32(rxmsg.data8, &ind) / 1e4; break; |
|
CAN_STATUS_3
for (int i = 0;i < CAN_STATUS_MSGS_TO_STORE;i++) {
can_status_msg_3 *stat_tmp_3 = &stat_msgs_3[i]; if (stat_tmp_3->id == id || stat_tmp_3->id == -1) { ind = 0; stat_tmp_3->id = id; stat_tmp_3->rx_time = chVTGetSystemTime(); stat_tmp_3->watt_hours = (float)buffer_get_int32(rxmsg.data8, &ind) / 1e4; stat_tmp_3->watt_hours_charged = (float)buffer_get_int32(rxmsg.data8, &ind) / 1e4; break; |
CAN_STATUS_4 for (int i = 0;i < CAN_STATUS_MSGS_TO_STORE;i++) { can_status_msg_4 *stat_tmp_4 = &stat_msgs_4[i]; if (stat_tmp_4->id == id || stat_tmp_4->id == -1) { ind = 0; stat_tmp_4->id = id; stat_tmp_4->rx_time = chVTGetSystemTime(); stat_tmp_4->temp_fet = (float)buffer_get_int16(rxmsg.data8, &ind) / 10.0; stat_tmp_4->temp_motor = (float)buffer_get_int16(rxmsg.data8, &ind) / 10.0; stat_tmp_4->current_in = (float)buffer_get_int16(rxmsg.data8, &ind) / 10.0; stat_tmp_4->pid_pos_now = (float)buffer_get_int16(rxmsg.data8, &ind) / 50.0; break; |
Thanks for sharing !
If you need, I built some tools you may find useful (like like what you've done) here :
https://drive.google.com/folderview?id=1cz4vvPLa9w7otzsrnxXuGm6yhv0MWV9E
Have a look at VESC_COMMUNICATION.xlsx
Regards
this may be a good place to ask:
If I send a CAN command via the UART (usb) will the vesc pass that on to the canbus?
specifically this:
comm_can_set_rpm(uint8_t controller_id, float rpm)
my goal is to have controller_0 connected to usb on the rpi, controller_1 connected to controller_0 via can, and be able to set motor speed of controller_1 by the usb cable between controller_0 and rpi
good job,i already finished my work on STM32F407VET6 boards.
jack li