
Hi Everyone.
I'm using two bldc geared motors and two individual vesc v6 as motor controller and i'm using pixhawk to give the signal to motor controller.. i'm trying to do sensorless, abi, and hall. in all the modes i have one common issue
while the robot does a zero turn.. one of the motor cranks and stop spinning(my robot has track system)
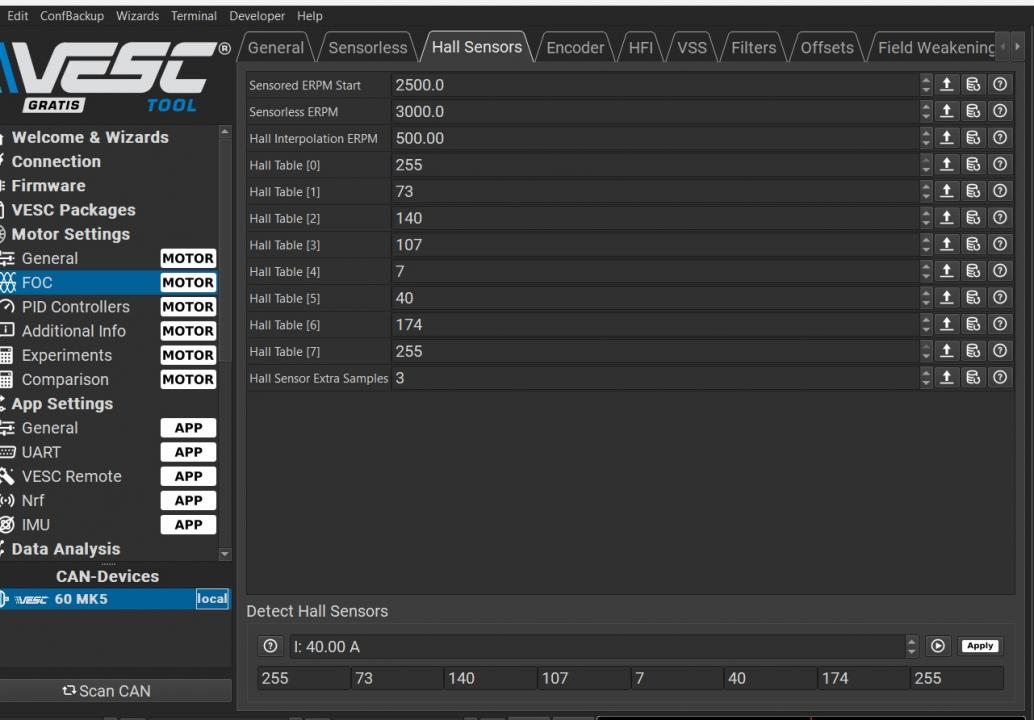
while detecting hall sensor these are the parameters i got
can someone help me in this? where could be the issue?