Hey all,
as you know, i build a custom pcb for my DPV (something like https://www.carbon-scooter.de/scooter.html#mono). I use a outrunner 60kv motor with 40A maximum motor current.
In BLDC mode, it works fine out of the Box. I reach a maximum eRPM about 25k @95% duty cycle and 23A motor current in rpm controlled mode. The DPV is fixed with a cord, so i measured a static maximum power. But in BLDC mode the dpv sounds under water like a kitchen aid and i want to use FOC
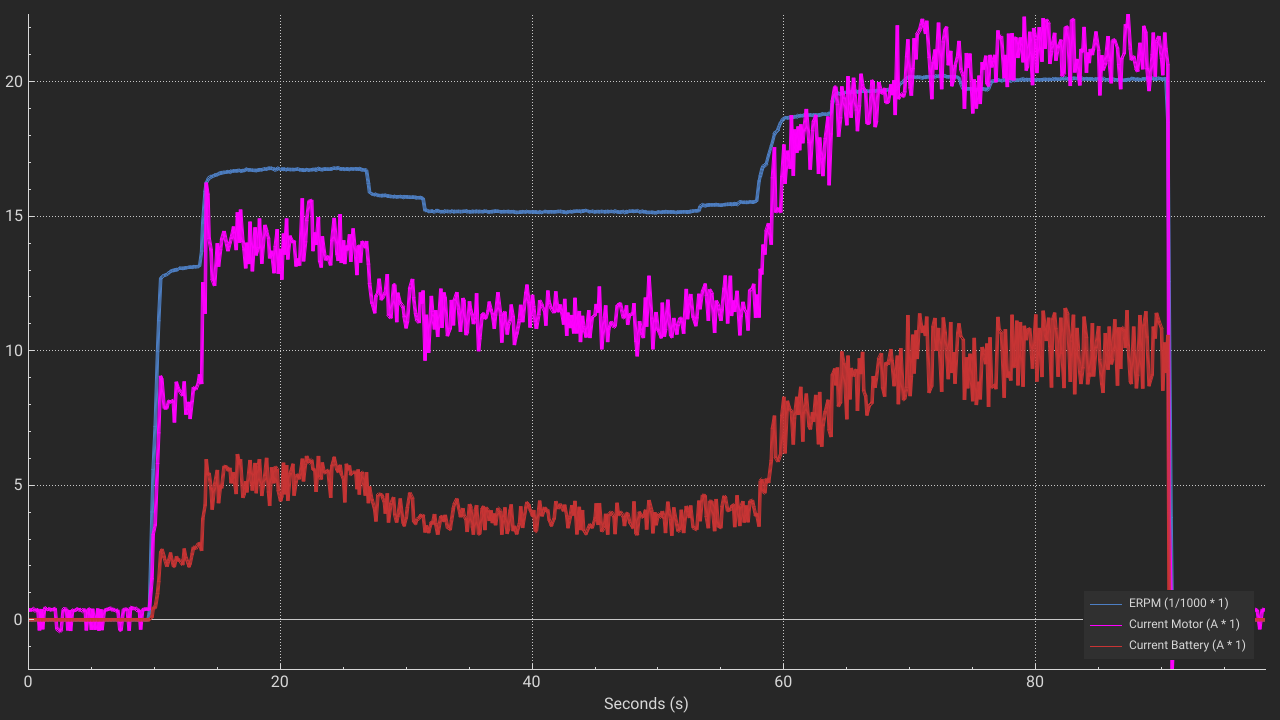
In FOC mode it works fine as long as i stay under 20k eRPM: RPM contanst, current constant:
when i increase the rpm it looks like this (the drops to zero were intentional)
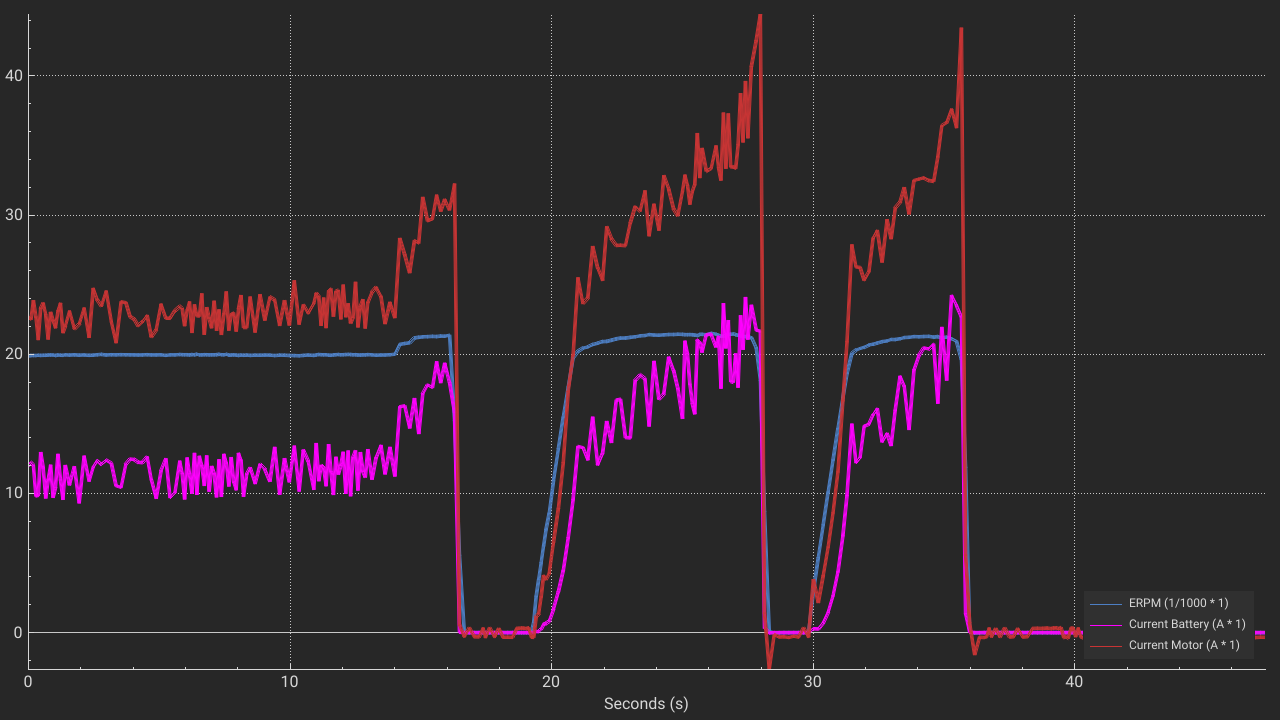
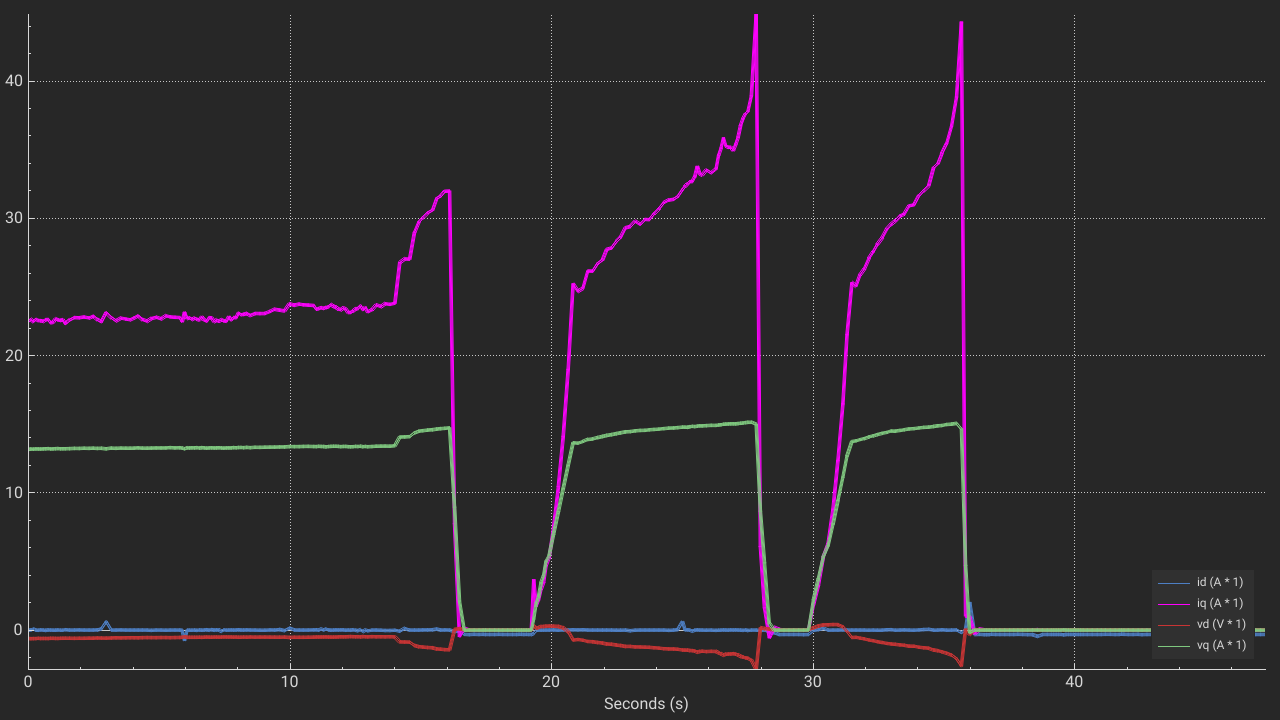
It is not possible to reach the 25k eRPM and the motor current is much higher then in bldc mode. I try to use the saturation compensation, but it has no influence. Are there any other options i can try ?
Can you confirm the currents with ann external measurement? Just to rule out a problem with your current measurement.
If the current really goes up like you measure in your custom vesc, it means the commutation angle becomes incorrect at that moment (since you say the motor can really go faster). I guess you are using sensorless control at these rpm, so that means you have to look into the parameters that affect the observer. Are you using one of the latest betas?
Hi Elwin,
the only way to test the scooter is in the local swimming pool and i can not carry all the equipment with me :) But i can measure lower motor current at home to validate the current measurement of my pcb. I will do this after my vaccation next week.
The motor is sensorless, yes. With 36V battery voltage, 60kv and 21 pole pairs the motor should reach something around 45k eRPM with no load. In bldc mode i reach under water 25k eRPM. I hope to reach this in foc mode, with similar power consumption and lower noise (hearable noise, not current noise :) )
Was interested in the high currents, low currents seem fine.
What about the firmware version, what do you use?
ok, i can try the foc_openloop command to create some current
I use the github dev branch -> 5.03
Sounds good. Are you already on the Discord? Many people there that might be able to help: https://discord.gg/hdn7sBhfzU
Discord ? i'm too old for new stuff :)
i will try, thanks
your discord link has an invalid invitation... :)