What is the use of a thread "Collection of Burned 100/250 Vesc´s"?
If it is about helping other to avoid burning VESCs or helping to improve the VESC tool, then more context is needed in what circumstances the damage occurred. Thus is would be good if the people who actually burned the VESC post this and explain what they did to help others to avoid that path.
@xenon321 You posted pictures of two burned VESCs that I took myself. I payed for the VESCs. Just because you got the pics, does not mean I'd like them to be published.
Now fot the context:
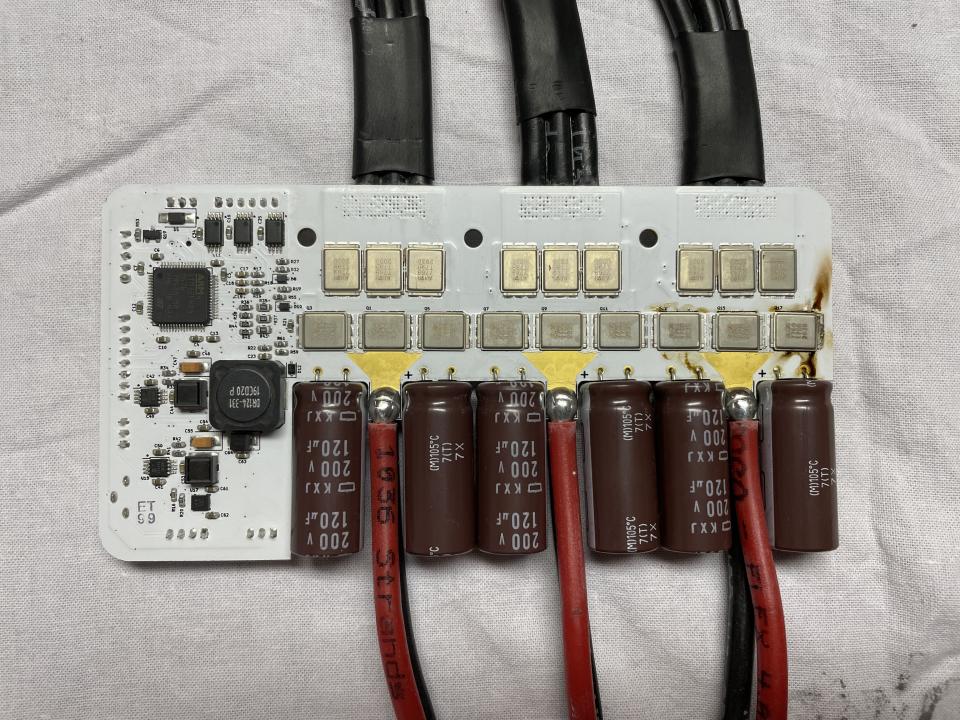
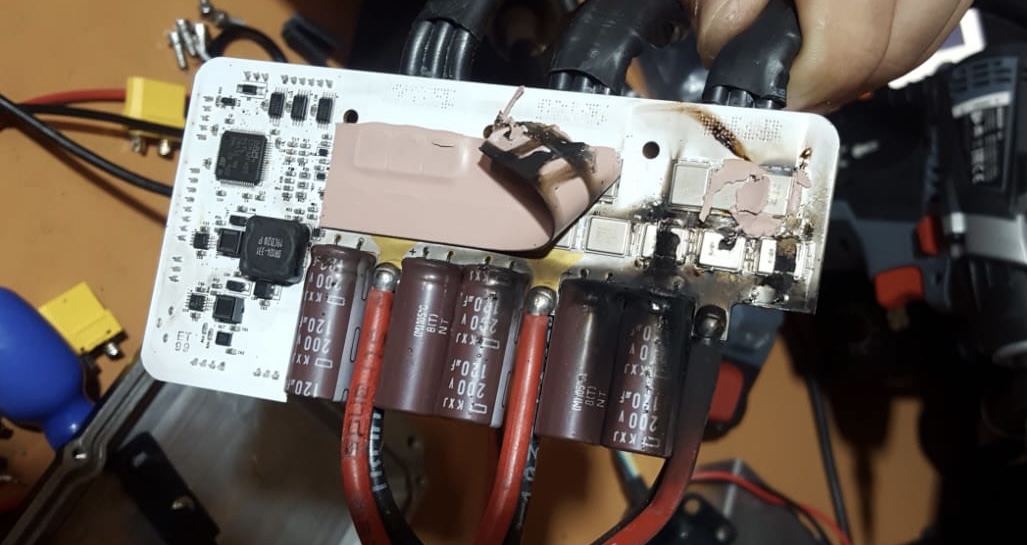
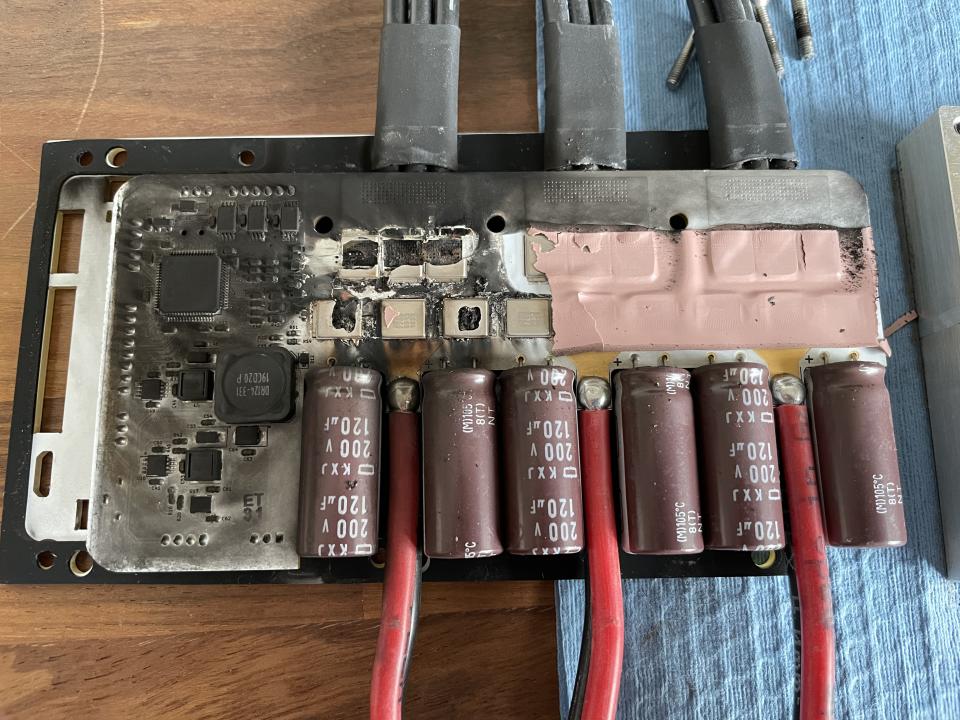
I already have two burned VESC 100 - 250 MKII (first and last picture above). That is testing at around 500€ / hour.
Both died on the test bench while working with a MAD M50C35 large brushless outrunner (54 poles, 34 KV, 140 cm propeller) and a big 20S, where the batteries were around 80 Volt. The target setup is a E-PPG trike / land plane aka powered paraglider.
The first one died on the stock firmware, the 2nd one died on the 5.03 beta 41 firmware (as of 2021-06-09). The 2nd one was still on and accessible after it stated to smell. This is the one and only error:
Fault : FAULT_CODE_ABS_OVER_CURRENT
Motor : 1
Current : 625.8
Current filtered : 407.8
Voltage : 76.73
Duty : 0.711
RPM : 70688.3
Tacho : 3562145
Cycles running : 1256087
TIM duty : 1990
TIM val samp : 2100
TIM current samp : 2100
TIM top : 2800
Comm step : 0
Temperature : 69.73
TBH I am in doubt if the VESC is the right controller for large brushless outrunners with lot's of poles, unless you are an expert of tuning in those motors. Using Auto-Detect won't save you from destroying the VESC. A clear disclaimer in that direction might prevent people from burning more VESCs.
If it is just a matter of doing it right then it would be great if someone can share a guild for the VESC on how to carefully tune large brushless outrunners correctly.
If you connect the VESC to a motor, test it in some way and it dies and then do the exact same thing again with a new unit you should expect the same outcome.
One problem with these larger motors is that I did not have many opportunities to test them and make the detection work well with them as they are expensive to buy and making test stands is also expensive and dangerous. So far I got a hold of a few and got all of them running well, but they were vastly different and required different setups.
Currently a T-motor U15 is on the way to me, which at least looks quite similar to this one but is smaller. I will try to get it running well, update the detection if needed/possible and show how I got it running. Then you can try the same approach with this motor and see how it goes. If you, for example, set the abs max current lower and stop the test once you start getting faults you can do it safely without burning the VESC. If the current gets much higher than the limits you know that the observer or current controller is not stable with the settings, and there is not point in continuing without adjusting something. Another note is that you should use a fuse with appropriate rating. The completely evaporated power stage comes from the fact that when they fail and short out, a huge current will flow until something in the systems burns through completely and stops the current flow. It is best to make that something a fuse rather than the VESC, cables or battery.
This is my experience also with tuning, for large motors to get them running well you normally need to do much more manual tuning. The best way is to set the abs max current to only 10-15% above the current limiit, then tune the detection parameters until you stop that from causing faults. Looking at the sampled current data and triggering on faults, you can easily see if the changes are helping or not. Once its tuned to the point it doesn't trigger faults then you can open up the limits a bit to stop random faults occurring.
I have seen a LOT of people having abs max current faults and their solution is to increase the limit! This is the completely wrong mentality and maybe needs addressed with something in the software to calculate what an appropriate limit should be. (If the abs max is set more than 1.2-1.5x the current limit something is probably wrong)
Changing the switching frequency during detection also seems to change measured inductance very significantly, especially on very low inductance motors.
Changing the deadtime compensation affects the measured resistance quite a lot as well.
Has anyone created a table of R, L, flux linkage, KI, KP, and observer gain values for different types of commonly used motors? That could help new users see if their detection values were sensible or diagnose detection errors.
> If you connect the VESC to a motor, test it in some way and it dies and then do the exact same thing again with a new unit you should expect the same outcome.
Sure, but that is not what we did.
We switched to the beta firmware and re-tested only after Frank suggested this would be the next step as you improved it quite a bit. Calculated values were different and the behavior was very different (better inital run up, but unstable at higher RPM, unable to reach the 10kW at all with 13kW on the old one) and we did not get ANY faults until the destruction (we got a few on the old firmware).
Therefore "... then tune the detection parameters until you stop that from causing faults" did not work, as the first fault was fatal. That is actually the main challenge for everyone trying a similar setup and I expect that folks shy away from using the VESC for those scenarios.
Benjamin, as requested to Frank a couple of times: I am happy to send you the motor for testing.
I value you time and a remote session is possible as well. You could get the remote control over the VESC tool via RDP or teamviewer and you can see the motor live on the test bench via zoom or whatever works best for you.
I am a bit concerned about the crash presented by xenon321, all the more so as soon I will be running the VESC 100/250, which will work with the freerchobby MP70141 15kw. Preliminary tests with the motor 2 kW passed without any problems, let me add that I used the battery pack 5s and so much less than the target voltage (20s).
How can I protect myself against VESC hardware damage, is a BMS with a current limit of 150A enough?
I would be grateful for any suggestions.
best regards
Mike
Vedder tested a T-Motor U 15 with the VESC100/250 recently. The design is similar, a high pole count outrunner. Problem: The stators go into saturation very early and in consequence standard parameters do not work after this point. Massive current spikes can occur under these conditions. With some manual tweaking Vedder could push the motor pretty far and reached very high output power in FOC. He will probably soon make a guidance for people using these kind of outrunners. These motors are a bit problematic, due to the fact that they saturate early and get instable in FOC operation quickly.
That matches what I have seen on these types of motor's. It's a problem for the smaller ones as well, such as MAD M9C12. Some way to map the saturation curve of the motor and account for it would go a long way I expect. Very interested to see what Vedder comes up with on this one!
To my understanding the max theoretical erpm on a VESC 75/300 e.g. is 150.000 erpm!
If the rule of thumb is correct that max shaft RPM is erpm/#polepairs, then with a 24 pole motor the limit would be 12.500 shaft RPMs ... before the VESC would "miss a lot" and eventually fry.
@dtydecks : RPM : 70688.3 / Current : 625.8 is reallly pushing it with a 24 pole motor on the VESC architecture ... I am not surprised ...
On another note:
Did anyone more qualified than me ever have the chance to look into a (Advanced Power Drives) APD HV_pro e.g.?
Those lill buggers are claimed to be good for up to 1.000.000 (1 milliion) erpms. (should take that 24 pole motor with ease!). What makes them that much faster/sturdier?
"the more I know, the more I realize how much I don't know"
It looks like those Advanced Power Drives are sensorless trapezoidal controllers judging by the product description. That method of control should be far less sensitive to sudden changes in motor parameters than foc.
@cmoalem the rpm shown in that post is erpm. These motors are normally very low kv and don't get close to max erpm. The problem is they saturate very early, not the rpm.
@TechAUmNu ... yes the difference to me is clear ...
thing is that FOC control loop in software on the current VESC hardware (32 bit, up to 180MHZ) obviously is burning some computing resources ... 150000 erpms (with tricks) are borderline for e.g. a 6 pole BLDC inrunner I am intending to use! (NOT a long board / eFoil application!!! Yes, they do exist too...)
Next iteration of VESC could consider using a small FOC in hardware!
don't let "servo" and "encoder" confuse you ... they can very well be used for BLDCs (for now unfortunately only 2-phase) as well! see https://youtu.be/DjoWdWBKudw
just an outlook into the future ... hopefully 3 phase is not far away.
"the more I know, the more I realize how much I don't know"
dug a bit deeper into the APDs ... and found in the documentation (yes the do publish a Fusion 360 3D schematic as well) for the HV_Pro 16s e.g. that they use 12 Mosfets per phase! (36 in total) ... have not even counted all those ceramic caps in the power stack stage.
No wonder they can stay "tiny" and not sweat it at all ...
The fancy Field Oriented Control implemented on the VESCs (unfortunately just in "software") is nice and most likely the future to come for all kinds of ESCs ... but the current hardware design is not cutting it for my application. Not the powerstage ... and not the compute power.
"the more I know, the more I realize how much I don't know"
> @dtydecks : RPM : 70688.3 / Current : 625.8 is reallly pushing it with a 24 pole motor on the VESC architecture ... I am not surprised ...
@cmoalem 625A was the error message output. By no mean we meant to push 600 A, not even half of it. All settings were way below this value, which did not prevent the (partial) destruction. It is 2 month since the VESC has been pickup for a repair by Trampa in the UK. Still waiting for my first update...
> Did anyone more qualified than me ever have the chance to look into a (Advanced Power Drives) APD HV_pro e.g.?
Yes (as in we did - I not stating that we are more qualified than you ;-).
We tested ADP HV Pro 24S (https://shop.powerdrives.net/?product=hv-pro-200-24) + 100V ADP CapBank (https://shop.powerdrives.net/?product=capacitor-bank) with exactly the same massive 20S battery, motor (MAD M50 34KV) and prop (140 cm 3-Blade E-Prop). It worked out of the box without any issues what so ever. It is a rather small ESC and I expected it to have heat problems, but actually it did not even get warm. In our case it was mounted on a larger alu plate with a heat sink at the rear - same position as the VESC 100/250 before).
I'm hoping to drive a T-Motor U15L (which have 42 magnets) with a VESC 75/300 but after reading that topic I need to be very cautious before doing tests and using it on my paramotor
Is using trapezoidal mode instead of FOC could solve the motor's saturation issue ?
I just noticed in the pictures that the 100/250 is using 200v/120uF KXJ capacitors.
Isn't the 100/250 using 100v mosfets?
You can use 100v caps with 100v mosfets as the mosfets will go into avalanche and limit the voltage.
Why do you not use 100v KZN or KYB caps instead and get 4x the capacitance and lower ESR?
A 100V cap will not have its full capacitance at full voltage. Interesting is the realistic capacitance at operating voltage.
It is wise to go higher in voltage rating and use overrated caps.
Most components on the VESC 100/250 are actually rated way above 100V. And in our experience the Mosfets don't brake down at rated voltage. We tested some of those Fets way above voltage rating and they didn't blow up, but still performed well! Not healthy for the Fets over time.... But they can cope with such beating astonishingly well.
"A 100V cap will not have its full capacitance at full voltage. Interesting is the realistic capacitance at operating voltage."
This is true for ceramic capacitors, electrolytic caps don't do this though, so you don't need to derate them as much.
This is true however the ESR does reduce with higher voltage ratings.
I feel as though Vedder has done enough research into this to know what works well.
In brushless motor control applications I don't see any downside with running more capacitance and lower ESR though
Hi Guys 1st time poster with high ambitions :-) very informative video and thanks to the firmware update ( i believe 5.3) it goes a long way towards me making the decision to place the order for the Trampa 100/250 Vesc for use with my MAD 50 (34Kv) motor . so newbie query i had to ask , does general opinion now mean that this vesc controller and updated firmware mean it will run this 32 Pole Pair motor for typically 5 minutes duration test running pushing circa 180-225 Amps ,, the dream is to use this controller in my Open ppg type EPPG powertrain . i still have loads to learn about VESC tool but having bought the motor id like to spin it up and get some data using the VESC option if possible . , cheers , appreciate any insight or feedback Thanks Guys
Hi Guys 1st time poster with high ambitions :-) very informative video and thanks to the firmware update ( i believe 5.3) it goes a long way towards me making the decision to place the order for the Trampa 100/250 Vesc for use with my MAD 50 (34Kv) motor . so newbie query i had to ask , does general opinion now mean that this vesc controller and updated firmware mean it will run this 32 Pole Pair motor for typically 5 minutes duration test running pushing circa 180-225 Amps ,, the dream is to use this controller in my Open ppg type EPPG powertrain . i still have loads to learn about VESC tool but having bought the motor id like to spin it up and get some data using the VESC option if possible . , cheers , appreciate any insight or feedback Thanks Guys
I would love to see you succeed in using the Trampa 100/250 VESC with MAD 50 (34Kv) motor. This is exactly the setup that made me burn three of them, with lot's of caution and even some video advice from Yoda himself. It it works for you then it might actually be flaws in the firmware that caused the burns.
That said, my advice is: Don't try it. Pick another ESC or another motor. If you still try it then do expect stuff to burn without prior warning.
The VESC seem to work well with some motors and the integration with the WAND throttle would be super nice for PPG. I am now flying a OpenPPG SP140 with the ADP UHV ESC and it just works well.
Hmmm...I use now the VESC 100/250 on a 28pole with 200A and up to 60V - 135kV, to drive a 40" propeller. I use antispark (active and passive) and no problem at all. I really started from the bottom up to settle the best max current and to trim the VESC. I even used 300A in BLDC mode. The Motor burned. The VESC was okay.
Hi Wannabeaflyer, you will need very good cooling on the Vesc as your 180-225 Amps relate to battery Amps? I can send you the configfile of dtydecks where the motor ran fine with 30khz switching frequency. The config will need adjustment if you are using the latest firmware as the configfile was done with firmware 5.03 beta 4. Send me a PM if you want the file for comparison.
Hi Guys major thanks for the feedback its all really appreciated , i too read the horror story about burnt VESC and even went down the road of looking to build a BESC which i found here , hoping to make use of JLC pcb assembly process to do the hard stuff soldering surface mounted parts , that got shot down once you realize the crazy situation the planet finds itself in where it seems the components needed are crazy long lead times or just out n out not available ........(*BUGGER)..
have a few vescs that i was going to use to learn the software and setup and also spin up the new Mad 50 34Kv motor . but that would have been way below normal operating voltages etc so learning tools ...the APD unit is a good Match by all accounts but Dammm the Price is draw deep breath time LOL ( in saying that i bought the motor so i guess its more savings to be done .... really liked the VESC option and the Price fell into i can do that bracket ...so once i read about the Inductance firmware fix i had big hopes to jump to using this 100/250 ..
by the looks of things i might have to hang back a bit but may still bite the bullet and with the feedback form you guys might have something to add to the community .. @electricfox i'll PM you as soon as im done this ,as im interested to check out the VESC setup for this motor . all part of the learning curve and trying to keep grey matter working ..
the Paramotor Project will be based on a TRIKE that i built built but not yet tested as i was changing from my C120 reduction drive setup to the new Mad Motor.. the old setup was based on an Alien Powersystem ESC 20S 350Amp ( need to go check that ) . can post pictures if yall promise not to laugh LOL
BIG thank you guys for the Time and info ....now wheres my Credit card :-)
Hi Tobias thanks for the input ., its all info gathering before i spend money :-) , i liked what the Open PPG guys are doing with the SP140 so already bought the Motor from European designer source, 3 day turnaround impressive service , but held back on getting the controller as the prices for the big players was 3 times the VESC . :-(
im talking myself into getting the vesc, even if i have to tone down the tests voltages as duration at circa 120 - 150 Amps seems to be what Open PPG Sp140 users are initially seeing at cruise ... the big hit is obviously take off , so wanted to find out if the 100/250 was up to it ( as mentioned cooling would be a big factor .. in case i missed it what make motor are you using for your project ?
im sorting justifying it by thinking ESC burn to cash ratio LOL :-) or is that burning ESC cash ... i'll cry when the blue white fluffy stuff is displayed buty chalk it up to experiance then cry some more
Oh Oh almost forgot , what Anti spark options are you using ? Cheers
Cheers Frank , this info along with the other tips i got from the crew sortta helped me decide . im gonna buy the Tampa 100/200 and hopefully will be able to get some decent results to show you guys here , As soon as the Controller arrives i'll do my best to post useful feedback , ( lets face it of im gonna need help this is the [lace to get it) so once again guys many thanks for the warnings and also the upside possibilities of trying this motor /ESC combo ..
Hi Guys my Controller is now in my hands at last :-) and the fun Begins very soon , i have just seen Benjamins new Video for Beta firmware upgrade so another step in the right direction for safer use of my Vesc 100/250 .. still need to sort out the 3 into one Phase leads connection so once im happy with that i can move on to low voltage ( 6S) before ramping things up
ngs up .. Cheers fot all the feedback and tips crew Cheers .. will keep ya'll posted once testing starts
Has anybody had issues with the Mosfets temperature getting to 80c or above? I have watercooling blocks under the ESC but it doesn't seem to cool them below 80c. Once the 80c temp is reached the power reduction takes place and Im flying at lower speeds.
I had a 75/300 and with the same cooling setup and the temps never got over 65c.
Im thinking ov raising the cutoff temp to 87c to see if this helps with keeping MAX power throughout my ride.
The 75/300 has 75V rated Mosfets with a lower On-resistance. In consequence it runs cooler under the same Amps pushed towards the motor.
The 100/250 performs just as good, but you need to compensate the lower possible Amps with higher voltage. It has a big effect when you mill out a pocket directly under the Mosfets, so that the water somes really close to the Mosfet surface.
I am planning to run the Tronic 250R on my U15II 80KV at 100V. It is a 21Pole pair motor. By right im able to hit 8000rpm at no load, but it seems that the vesc is limiting it by the ERPM. Lets say ERPM limit is 100,000. By this, I would only achieve RPM= 100,000 / 21 = 4761. Planning to get it to run to 8000RPM with no load. What parameters can i change to hit 8000rpm?or is the vesc limited by the erpm. Thank you


What is the use of a thread "Collection of Burned 100/250 Vesc´s"?
If it is about helping other to avoid burning VESCs or helping to improve the VESC tool, then more context is needed in what circumstances the damage occurred. Thus is would be good if the people who actually burned the VESC post this and explain what they did to help others to avoid that path.
@xenon321 You posted pictures of two burned VESCs that I took myself. I payed for the VESCs. Just because you got the pics, does not mean I'd like them to be published.
Now fot the context:
I already have two burned VESC 100 - 250 MKII (first and last picture above). That is testing at around 500€ / hour.
Both died on the test bench while working with a MAD M50C35 large brushless outrunner (54 poles, 34 KV, 140 cm propeller) and a big 20S, where the batteries were around 80 Volt. The target setup is a E-PPG trike / land plane aka powered paraglider.
The first one died on the stock firmware, the 2nd one died on the 5.03 beta 41 firmware (as of 2021-06-09). The 2nd one was still on and accessible after it stated to smell. This is the one and only error:
Fault : FAULT_CODE_ABS_OVER_CURRENT
Motor : 1
Current : 625.8
Current filtered : 407.8
Voltage : 76.73
Duty : 0.711
RPM : 70688.3
Tacho : 3562145
Cycles running : 1256087
TIM duty : 1990
TIM val samp : 2100
TIM current samp : 2100
TIM top : 2800
Comm step : 0
Temperature : 69.73
TBH I am in doubt if the VESC is the right controller for large brushless outrunners with lot's of poles, unless you are an expert of tuning in those motors. Using Auto-Detect won't save you from destroying the VESC. A clear disclaimer in that direction might prevent people from burning more VESCs.
If it is just a matter of doing it right then it would be great if someone can share a guild for the VESC on how to carefully tune large brushless outrunners correctly.
If you connect the VESC to a motor, test it in some way and it dies and then do the exact same thing again with a new unit you should expect the same outcome.
One problem with these larger motors is that I did not have many opportunities to test them and make the detection work well with them as they are expensive to buy and making test stands is also expensive and dangerous. So far I got a hold of a few and got all of them running well, but they were vastly different and required different setups.
Currently a T-motor U15 is on the way to me, which at least looks quite similar to this one but is smaller. I will try to get it running well, update the detection if needed/possible and show how I got it running. Then you can try the same approach with this motor and see how it goes. If you, for example, set the abs max current lower and stop the test once you start getting faults you can do it safely without burning the VESC. If the current gets much higher than the limits you know that the observer or current controller is not stable with the settings, and there is not point in continuing without adjusting something. Another note is that you should use a fuse with appropriate rating. The completely evaporated power stage comes from the fact that when they fail and short out, a huge current will flow until something in the systems burns through completely and stops the current flow. It is best to make that something a fuse rather than the VESC, cables or battery.
This is my experience also with tuning, for large motors to get them running well you normally need to do much more manual tuning. The best way is to set the abs max current to only 10-15% above the current limiit, then tune the detection parameters until you stop that from causing faults. Looking at the sampled current data and triggering on faults, you can easily see if the changes are helping or not. Once its tuned to the point it doesn't trigger faults then you can open up the limits a bit to stop random faults occurring.
I have seen a LOT of people having abs max current faults and their solution is to increase the limit! This is the completely wrong mentality and maybe needs addressed with something in the software to calculate what an appropriate limit should be. (If the abs max is set more than 1.2-1.5x the current limit something is probably wrong)
Changing the switching frequency during detection also seems to change measured inductance very significantly, especially on very low inductance motors.
Changing the deadtime compensation affects the measured resistance quite a lot as well.
Has anyone created a table of R, L, flux linkage, KI, KP, and observer gain values for different types of commonly used motors? That could help new users see if their detection values were sensible or diagnose detection errors.
> If you connect the VESC to a motor, test it in some way and it dies and then do the exact same thing again with a new unit you should expect the same outcome.
Sure, but that is not what we did.
We switched to the beta firmware and re-tested only after Frank suggested this would be the next step as you improved it quite a bit. Calculated values were different and the behavior was very different (better inital run up, but unstable at higher RPM, unable to reach the 10kW at all with 13kW on the old one) and we did not get ANY faults until the destruction (we got a few on the old firmware).
Therefore "... then tune the detection parameters until you stop that from causing faults" did not work, as the first fault was fatal. That is actually the main challenge for everyone trying a similar setup and I expect that folks shy away from using the VESC for those scenarios.
Benjamin, as requested to Frank a couple of times: I am happy to send you the motor for testing.
I value you time and a remote session is possible as well. You could get the remote control over the VESC tool via RDP or teamviewer and you can see the motor live on the test bench via zoom or whatever works best for you.
Hello,
I am a bit concerned about the crash presented by xenon321, all the more so as soon I will be running the VESC 100/250, which will work with the freerchobby MP70141 15kw. Preliminary tests with the motor 2 kW passed without any problems, let me add that I used the battery pack 5s and so much less than the target voltage (20s).
How can I protect myself against VESC hardware damage, is a BMS with a current limit of 150A enough?
I would be grateful for any suggestions.
best regards
Mike
Vedder tested a T-Motor U 15 with the VESC100/250 recently. The design is similar, a high pole count outrunner. Problem: The stators go into saturation very early and in consequence standard parameters do not work after this point. Massive current spikes can occur under these conditions. With some manual tweaking Vedder could push the motor pretty far and reached very high output power in FOC. He will probably soon make a guidance for people using these kind of outrunners. These motors are a bit problematic, due to the fact that they saturate early and get instable in FOC operation quickly.
That matches what I have seen on these types of motor's. It's a problem for the smaller ones as well, such as MAD M9C12. Some way to map the saturation curve of the motor and account for it would go a long way I expect. Very interested to see what Vedder comes up with on this one!
saturation detection and mapping would be great
Hola xenon321 , he probado el Mad M50c35 en mi controladora personalizada asta los 11 kilowatios, https://www.youtube.com/watch?v=OP7dEkLCBeQ
rentelwifi
To my understanding the max theoretical erpm on a VESC 75/300 e.g. is 150.000 erpm!
If the rule of thumb is correct that max shaft RPM is erpm/#polepairs, then with a 24 pole motor the limit would be 12.500 shaft RPMs ... before the VESC would "miss a lot" and eventually fry.
@dtydecks : RPM : 70688.3 / Current : 625.8 is reallly pushing it with a 24 pole motor on the VESC architecture ... I am not surprised ...
On another note:
Did anyone more qualified than me ever have the chance to look into a (Advanced Power Drives) APD HV_pro e.g.?
Those lill buggers are claimed to be good for up to 1.000.000 (1 milliion) erpms. (should take that 24 pole motor with ease!). What makes them that much faster/sturdier?
"the more I know, the more I realize how much I don't know"
It looks like those Advanced Power Drives are sensorless trapezoidal controllers judging by the product description. That method of control should be far less sensitive to sudden changes in motor parameters than foc.
@cmoalem the rpm shown in that post is erpm. These motors are normally very low kv and don't get close to max erpm. The problem is they saturate very early, not the rpm.
@TechAUmNu ... yes the difference to me is clear ...
thing is that FOC control loop in software on the current VESC hardware (32 bit, up to 180MHZ) obviously is burning some computing resources ... 150000 erpms (with tricks) are borderline for e.g. a 6 pole BLDC inrunner I am intending to use! (NOT a long board / eFoil application!!! Yes, they do exist too...)
Next iteration of VESC could consider using a small FOC in hardware!
They are available now! e.g. https://www.trinamic.com/products/integrated-circuits/details/tmc4671/
don't let "servo" and "encoder" confuse you ... they can very well be used for BLDCs (for now unfortunately only 2-phase) as well! see https://youtu.be/DjoWdWBKudw
just an outlook into the future ... hopefully 3 phase is not far away.
"the more I know, the more I realize how much I don't know"
dug a bit deeper into the APDs ... and found in the documentation (yes the do publish a Fusion 360 3D schematic as well) for the HV_Pro 16s e.g. that they use 12 Mosfets per phase! (36 in total) ... have not even counted all those ceramic caps in the power stack stage.
No wonder they can stay "tiny" and not sweat it at all ...
The fancy Field Oriented Control implemented on the VESCs (unfortunately just in "software") is nice and most likely the future to come for all kinds of ESCs ... but the current hardware design is not cutting it for my application. Not the powerstage ... and not the compute power.
"the more I know, the more I realize how much I don't know"
> @dtydecks : RPM : 70688.3 / Current : 625.8 is reallly pushing it with a 24 pole motor on the VESC architecture ... I am not surprised ...
@cmoalem 625A was the error message output. By no mean we meant to push 600 A, not even half of it. All settings were way below this value, which did not prevent the (partial) destruction. It is 2 month since the VESC has been pickup for a repair by Trampa in the UK. Still waiting for my first update...
> Did anyone more qualified than me ever have the chance to look into a (Advanced Power Drives) APD HV_pro e.g.?
Yes (as in we did - I not stating that we are more qualified than you ;-).
We tested ADP HV Pro 24S (https://shop.powerdrives.net/?product=hv-pro-200-24) + 100V ADP CapBank (https://shop.powerdrives.net/?product=capacitor-bank) with exactly the same massive 20S battery, motor (MAD M50 34KV) and prop (140 cm 3-Blade E-Prop). It worked out of the box without any issues what so ever. It is a rather small ESC and I expected it to have heat problems, but actually it did not even get warm. In our case it was mounted on a larger alu plate with a heat sink at the rear - same position as the VESC 100/250 before).
Hi everyone,
I'm hoping to drive a T-Motor U15L (which have 42 magnets) with a VESC 75/300 but after reading that topic I need to be very cautious before doing tests and using it on my paramotor
Is using trapezoidal mode instead of FOC could solve the motor's saturation issue ?
You can watch this video: https://cloud.vedder.se/index.php/s/jpm9Soiq68HBbdw
This is about tuning in a T-Motor U 15.
Hi frank,
Thanks for the link, it is very instructive ! I now know more about safely tweaking the FOC parameters for this type of motor
I will test my T-Motor U15L with the latest firmware and report back on the forum as soon as I can
I just noticed in the pictures that the 100/250 is using 200v/120uF KXJ capacitors.
Isn't the 100/250 using 100v mosfets?
You can use 100v caps with 100v mosfets as the mosfets will go into avalanche and limit the voltage.
Why do you not use 100v KZN or KYB caps instead and get 4x the capacitance and lower ESR?
A 100V cap will not have its full capacitance at full voltage. Interesting is the realistic capacitance at operating voltage.
It is wise to go higher in voltage rating and use overrated caps.
Most components on the VESC 100/250 are actually rated way above 100V. And in our experience the Mosfets don't brake down at rated voltage. We tested some of those Fets way above voltage rating and they didn't blow up, but still performed well! Not healthy for the Fets over time.... But they can cope with such beating astonishingly well.
"A 100V cap will not have its full capacitance at full voltage. Interesting is the realistic capacitance at operating voltage."
This is true for ceramic capacitors, electrolytic caps don't do this though, so you don't need to derate them as much.
This is true however the ESR does reduce with higher voltage ratings.
I feel as though Vedder has done enough research into this to know what works well.
In brushless motor control applications I don't see any downside with running more capacitance and lower ESR though
"This is true however the ESR does reduce with higher voltage ratings."
Capacitor data sheets don't agree, in the same can size you will have lower capacitance and higher ESR.
https://www.mouser.co.uk/datasheet/2/420/KZNLL_e-2509151.pdf
Hi Guys 1st time poster with high ambitions :-) very informative video and thanks to the firmware update ( i believe 5.3) it goes a long way towards me making the decision to place the order for the Trampa 100/250 Vesc for use with my MAD 50 (34Kv) motor . so newbie query i had to ask , does general opinion now mean that this vesc controller and updated firmware mean it will run this 32 Pole Pair motor for typically 5 minutes duration test running pushing circa 180-225 Amps ,, the dream is to use this controller in my Open ppg type EPPG powertrain . i still have loads to learn about VESC tool but having bought the motor id like to spin it up and get some data using the VESC option if possible . , cheers , appreciate any insight or feedback Thanks Guys
Hi Guys 1st time poster with high ambitions :-) very informative video and thanks to the firmware update ( i believe 5.3) it goes a long way towards me making the decision to place the order for the Trampa 100/250 Vesc for use with my MAD 50 (34Kv) motor . so newbie query i had to ask , does general opinion now mean that this vesc controller and updated firmware mean it will run this 32 Pole Pair motor for typically 5 minutes duration test running pushing circa 180-225 Amps ,, the dream is to use this controller in my Open ppg type EPPG powertrain . i still have loads to learn about VESC tool but having bought the motor id like to spin it up and get some data using the VESC option if possible . , cheers , appreciate any insight or feedback Thanks Guys
Hey Wannabeaflyer,
I would love to see you succeed in using the Trampa 100/250 VESC with MAD 50 (34Kv) motor. This is exactly the setup that made me burn three of them, with lot's of caution and even some video advice from Yoda himself. It it works for you then it might actually be flaws in the firmware that caused the burns.
That said, my advice is: Don't try it. Pick another ESC or another motor. If you still try it then do expect stuff to burn without prior warning.
The VESC seem to work well with some motors and the integration with the WAND throttle would be super nice for PPG. I am now flying a OpenPPG SP140 with the ADP UHV ESC and it just works well.
Hmmm...I use now the VESC 100/250 on a 28pole with 200A and up to 60V - 135kV, to drive a 40" propeller. I use antispark (active and passive) and no problem at all. I really started from the bottom up to settle the best max current and to trim the VESC. I even used 300A in BLDC mode. The Motor burned. The VESC was okay.
Kind regards, Tobias
Hi Wannabeaflyer, you will need very good cooling on the Vesc as your 180-225 Amps relate to battery Amps? I can send you the configfile of dtydecks where the motor ran fine with 30khz switching frequency. The config will need adjustment if you are using the latest firmware as the configfile was done with firmware 5.03 beta 4. Send me a PM if you want the file for comparison.
Link to forum post: VESC help offered for private persons and companies
Website: www.electricfox.de
Hi Guys major thanks for the feedback its all really appreciated , i too read the horror story about burnt VESC and even went down the road of looking to build a BESC which i found here , hoping to make use of JLC pcb assembly process to do the hard stuff soldering surface mounted parts , that got shot down once you realize the crazy situation the planet finds itself in where it seems the components needed are crazy long lead times or just out n out not available ........(*BUGGER)..
have a few vescs that i was going to use to learn the software and setup and also spin up the new Mad 50 34Kv motor . but that would have been way below normal operating voltages etc so learning tools ...the APD unit is a good Match by all accounts but Dammm the Price is draw deep breath time LOL ( in saying that i bought the motor so i guess its more savings to be done .... really liked the VESC option and the Price fell into i can do that bracket ...so once i read about the Inductance firmware fix i had big hopes to jump to using this 100/250 ..
by the looks of things i might have to hang back a bit but may still bite the bullet and with the feedback form you guys might have something to add to the community .. @electricfox i'll PM you as soon as im done this ,as im interested to check out the VESC setup for this motor . all part of the learning curve and trying to keep grey matter working ..
the Paramotor Project will be based on a TRIKE that i built built but not yet tested as i was changing from my C120 reduction drive setup to the new Mad Motor.. the old setup was based on an Alien Powersystem ESC 20S 350Amp ( need to go check that ) . can post pictures if yall promise not to laugh LOL
BIG thank you guys for the Time and info ....now wheres my Credit card :-)
Hi Tobias thanks for the input ., its all info gathering before i spend money :-) , i liked what the Open PPG guys are doing with the SP140 so already bought the Motor from European designer source, 3 day turnaround impressive service , but held back on getting the controller as the prices for the big players was 3 times the VESC . :-(
im talking myself into getting the vesc, even if i have to tone down the tests voltages as duration at circa 120 - 150 Amps seems to be what Open PPG Sp140 users are initially seeing at cruise ... the big hit is obviously take off , so wanted to find out if the 100/250 was up to it ( as mentioned cooling would be a big factor .. in case i missed it what make motor are you using for your project ?
im sorting justifying it by thinking ESC burn to cash ratio LOL :-) or is that burning ESC cash ... i'll cry when the blue white fluffy stuff is displayed buty chalk it up to experiance then cry some more
Oh Oh almost forgot , what Anti spark options are you using ? Cheers
If you use the new VESC-Tool the motor should dial in nicely from the start with maybe the need to adjust the observer gain or times constant a bit.
In case you push too much power the VESC will heat up fast and it will scale back power to prevent overheating. It will not burn to ashes.
Cheers Frank , this info along with the other tips i got from the crew sortta helped me decide . im gonna buy the Tampa 100/200 and hopefully will be able to get some decent results to show you guys here , As soon as the Controller arrives i'll do my best to post useful feedback , ( lets face it of im gonna need help this is the [lace to get it) so once again guys many thanks for the warnings and also the upside possibilities of trying this motor /ESC combo ..
Hi Guys my Controller is now in my hands at last :-) and the fun Begins very soon , i have just seen Benjamins new Video for Beta firmware upgrade so another step in the right direction for safer use of my Vesc 100/250 .. still need to sort out the 3 into one Phase leads connection so once im happy with that i can move on to low voltage ( 6S) before ramping things up
ngs up .. Cheers fot all the feedback and tips crew Cheers .. will keep ya'll posted once testing starts
Has anybody had issues with the Mosfets temperature getting to 80c or above? I have watercooling blocks under the ESC but it doesn't seem to cool them below 80c. Once the 80c temp is reached the power reduction takes place and Im flying at lower speeds.
I had a 75/300 and with the same cooling setup and the temps never got over 65c.
Im thinking ov raising the cutoff temp to 87c to see if this helps with keeping MAX power throughout my ride.
The 75/300 has 75V rated Mosfets with a lower On-resistance. In consequence it runs cooler under the same Amps pushed towards the motor.
The 100/250 performs just as good, but you need to compensate the lower possible Amps with higher voltage. It has a big effect when you mill out a pocket directly under the Mosfets, so that the water somes really close to the Mosfet surface.
I am planning to run the Tronic 250R on my U15II 80KV at 100V. It is a 21Pole pair motor. By right im able to hit 8000rpm at no load, but it seems that the vesc is limiting it by the ERPM. Lets say ERPM limit is 100,000. By this, I would only achieve RPM= 100,000 / 21 = 4761. Planning to get it to run to 8000RPM with no load. What parameters can i change to hit 8000rpm?or is the vesc limited by the erpm. Thank you
Just set the limit to a higher value, if the firmware on your Tronic allows you to do so. In most cases max recommended is 150000ERPM.
Link to forum post: VESC help offered for private persons and companies
Website: www.electricfox.de