Hi,
I have mostly setup my ESC and BLDC and I'm currently tuning the motor.
I'm using FOC control with hall sensors. The motor detection works and consistently finds the R, L, Flux Linkage and PI parameters for FOC. Hall detection works consistently too.
Under light load the motor spins freely without noise. However under moderate load with higher currents, during certain periods of the commutation, the motor will make a high pitched wine and the torque produced is not smooth. Under higher loads when the current is ramped quickly, the motor will vibrate and stall with the same high pitched wine (more of an ear piercing screech in this condition!)
I have captured sampled data from the VESC Tool and with a current clamp on one of the phases when this occurs.
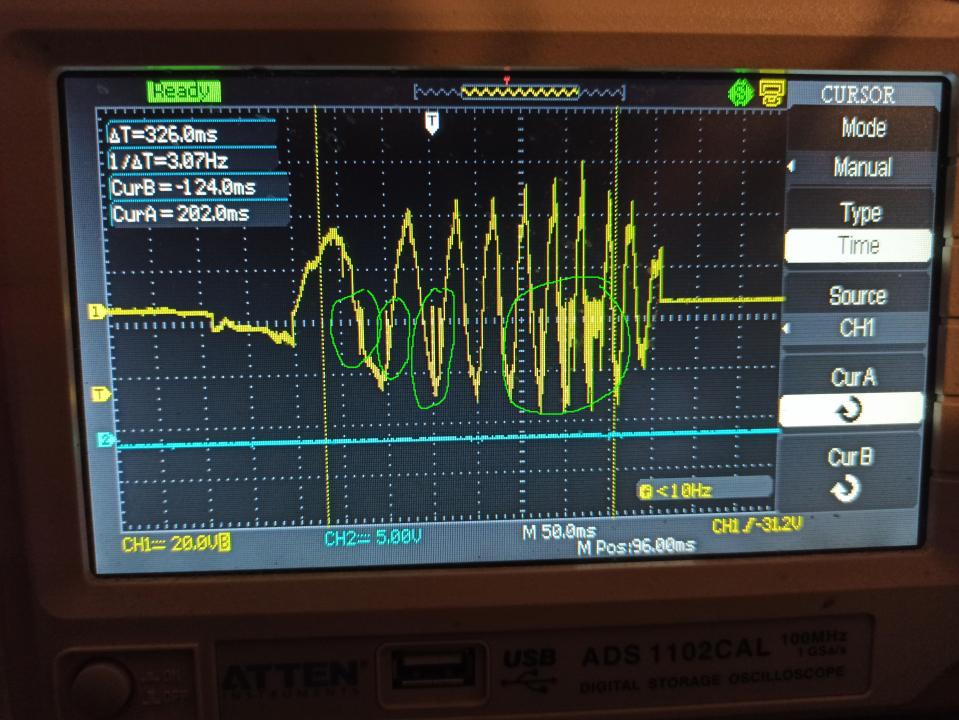
Current clamp on phase 1 (Y axis inverted!)
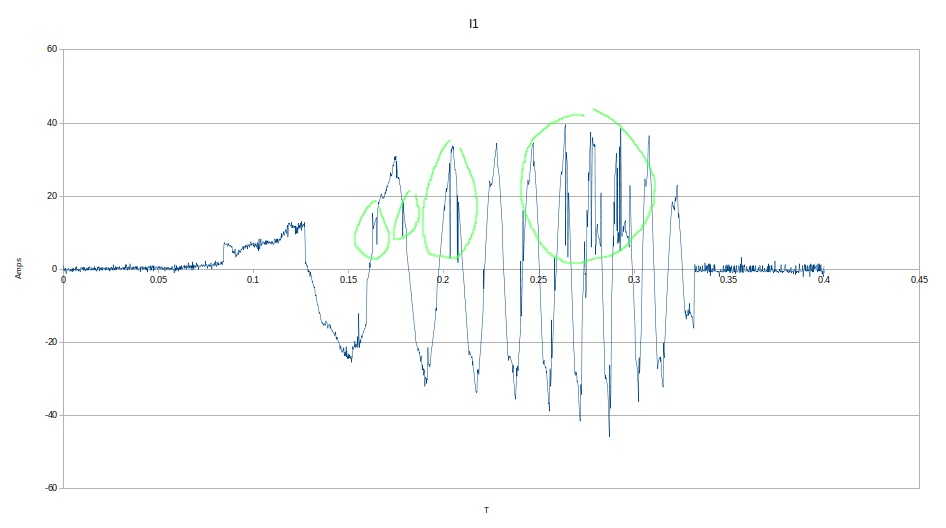
VESC Tool sampled data from phase 1:
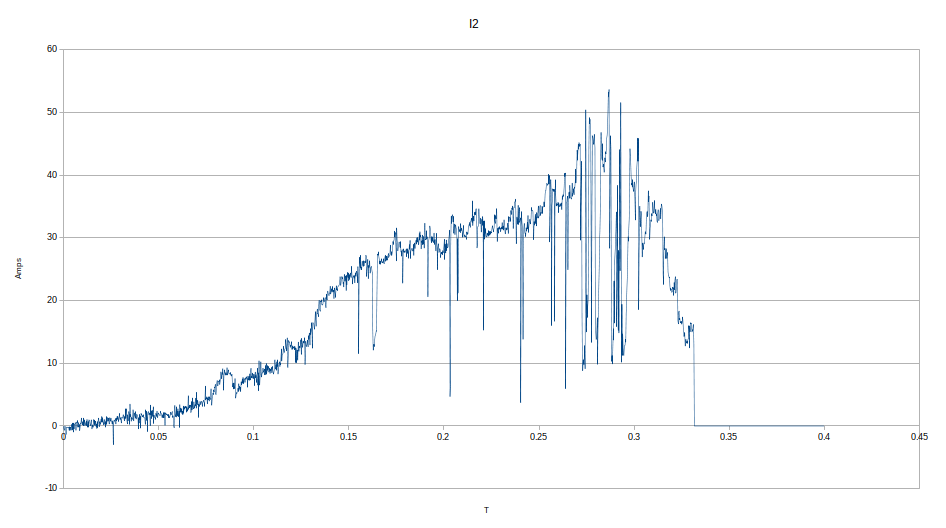
VESC Tool sampled data I total:
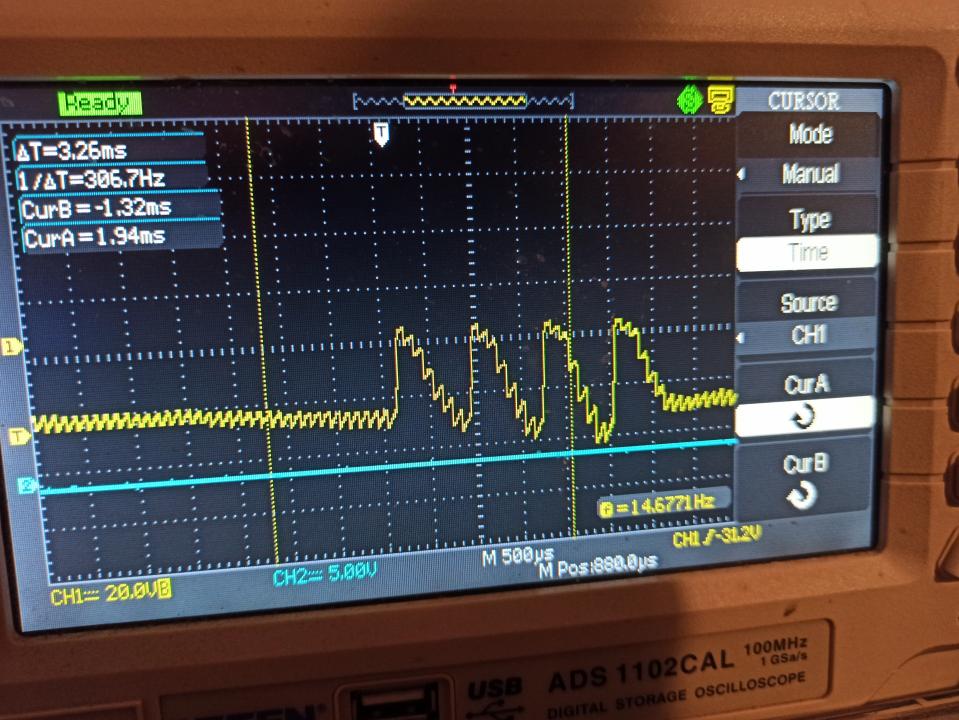
Zooming in on the glitches in time using the current clamp shows that they are roughly 1mS long, with the current immediately dropping to zero before slowly ramping back up again. The switching frequency of 10 KHz can be seen on the waveform.
I'm at a bit of a loss as to where these glitches are coming from. The glitches are present on all phases.
I am running completely with hall sensors (setting Sensorless ERPM to 100K) because I want to tune Sensorless later. Hall sensor detection went well, but also exhibited these glitches during its measurement.
Some things that I have tried:
- Adjusting the FOC parameters (KP, KI and Observer gain)
- Adjusting stator saturation compensation from 0% up to 50%.
- Adjusting dead time compensation from 50 uS up to 500uS
- Adjusting Switching Frequency from 5 KHz -> 30 KHz
- Adding some D Current injection
- Setting Current Controller Decoupling to disabled and cross.
- Setting openloop ERPM from 0 to 1000
- Replacing the existing non-latching A3144 hall sensors with SS466A latching hall sensors inside the motor.
I'm at a bit of a loss where to go next. Has anyone encountered a similar issue?
I should add: I am running with a 16 cell battery at ~70V with a current limit set to 60A.
Why would you run such high eRPM sensored? You want to switch to sensored as soon as you get the motor going and the observer is tracking the motor reliably.
According to my tests, hall sensors tend to work pretty rough under load even at small RPMs and it gets worse as you speed up.
NextGen FOC High voltage 144v/34s, 30kw (https://vesc-project.com/node/1477)
Hi,
Thanks for your reply vadicus. I was just setting the sensorless ERPM high to force the controller to use sensored mode while I was testing things at low RPM. I have no intention of running such high ERPM with sensored mode once it is correctly setup!
I have made some progress into diagnosing the problem. If I run the VESC open loop I got the same faults occurring. I can reliably cause the faults to happen continuously by driving a substantial current at a fixed electrical angle using the VESC command:
The following screenshot of the sampled data capture shows the behavior.
Probing the phase voltages showed normal waveforms on the B/C outputs, but phase A showed very strange pulses of voltage (yellow) when the fault is indicated by a drop in phase current (blue).
Zooming in on the fault shows that during the fault, the output is only high for very short periods of time and low for the rest of it, causing the current to rapidly drop.
I started probing around on the ESC for the behavior of the PWM drive signals to the UCC27211 gate drivers. Probing L1/L2/L3 and H2/H3 showed normal looking waveforms, however probing H1 caused the fault to continuously misbehave rather than occasionally as before. This is quite surprising because this line should be driven quite hard by the microcontroller and the scope probe has a high 10 Mohm || 20 pF input impedence, thus shouldn't really affect the signal. Same behavior with a multimeter. I am now suspecting that the pin driver on the micro is blown out (possibly ESD damage?).
I'm going to order a replacement device and swap it out with the current one and see where that gets me.
Also: I just noticed this thread should be titled 75/200 rather than 75/300. Oops.
A blown driver is a possibility. Screeching noise, motor jerking, etc would be an indication of that.
That would also result in incorrect R and L, etc detection values. If in doubt, I use an LCR meter to make sure the detection results are reasonable.
Drivers (and mosfets) usually blow up due to a poor driver circuit layout (parasitic inductance, capacitance, etc.). I've blown a good share of them before getting the driver circuit right.
A bad design becomes even less forgiving once you start ramping up the current and voltage.
NextGen FOC High voltage 144v/34s, 30kw (https://vesc-project.com/node/1477)
Having used 50-80kv motors a lot I'd highly recommend against them. The lower kv leads to sharp current spikes which makes ESCs regularly current limit. Unfortunately you're far better off with higher kv motors, say 170kv and an extra stage of gearing. This sounds like that.
Hi,
Vadicus: Unfortunately I don't have an LCR meter handy, but the calculated values seem about right based on Benjamin V's formulas.
TheFallen: I'm inclined to agree, but the mechanical design has forced me into this spot for the torque that I want and the packaging. Re-doing the mechanicals at this point will be a big job so I was hoping to get something at least partially working with what I've already got. Did you ever have any luck with such motors an VESC controllers? Any tips or tricks would be welcome.
I threw the parts cannon at the problem, unfortunately to no avail. I replaced the micro and, with a nod from Vadicus, the three gate drivers with new parts. WSON-8 parts for the gate drivers are a pain to reflow by hand! Exactly the same problem persisted for a while until I caused a bang (more on that later).
One interesting thing came out of this exercise was that it appears that the original ESC may have been using counterfeit parts. Looking at the picture below shows the original micro on the left with the new (from Mouser) part on the right. Notice how much poorer the laser marking is on the left, how different the font is, and that the molding has completely different ejector pin locations. The marking also doesn't match the device's datasheet (p169). It's possible this is a part made by a different packaging house, but my guess is a pile of bare dies that were "rescued" from the QA failure bin. All conjecture of course.
Next, I reviewed the board against the schematic of the VESC 75/300 and noticed that the Flipsky ESC appears to miss out two configurable lowpass filters on the voltage and current sense lines into the ADC on the micro (marked in blue here), presumably as a cost-saving measure.
I tried adding capacitors of these values to replicate the functionality, but again without any difference to the behavior.
Unfortunately, my next step was to foolishly mistake a +5V lead for a GND lead while I setup my scope for some more probing. The was the result. Oops. Back to the drawing board.
While the end result was definitely my fault, after pulling it apart I'm a bit suspicious of the build quality of the FlipSky ESC.
I think the next step will be to try a Trampa supplied ESC.
I am wondering if you attempted to contact the seller about this and what the response was? Since you are seeking help here at the forum, I am guessing they weren't much of help or no?
One big reason I ended up designing my own hardware was getting fed up with Chinese quality and, most importantly, lack of concern what happens after it's sold. I am sure some companies in China care about what they make and can actually make top notch products but that's an exception rather than a rule. The general tendency is that everyone is copying some reference design and make very bad copies of each other's stuff. The idea is to sell you something at a the cheapest price possible and what happens after that no one cares other than you as a consumer. Buying something at the cheapest price possible, however, comes at a price and the price is that it is simply not working and you have to ask questions at forums rather than seeking support from the seller that you paid to. In the long run, you overpay for the cheap stuff with the time and effort you have to spend on getting things to work if you are lucky. Most of the time, however, you end up throwing it away. The morale of the story is: buy stuff from someone who stands behind their products. For example, buy the official/original Vedder hardware so you can always go back and get the proper support when you need it.
NextGen FOC High voltage 144v/34s, 30kw (https://vesc-project.com/node/1477)
The closest we got to happiness was using ARC200s, but they're discontinued so that's moot. The solution we wanted to try next was to move to high kv motors, say 50-80kv to ~170kv motors and adjust the gear ratios. One that might work would be to choose ESCs that can handle well in excess of the planned current to avoid it current limiting on the spikes, so yeah, VESC 75/300s or higher.
Vadicus:- I have yet to contact the seller but I will do. There's not much chance of getting my money back after I've torn the thing to pieces and smoked a MOSFET, but they might appreciate some feedback. One thing that really confounded my worries once I pulled it apart was that the gate drivers are physically quite far away from the FETs, sitting on a separate board along with the digital parts, connected by 0.1" headers. I can imagine that the high di/dt on the gate lines combined with a large loop between the driver and the FETs might have been part of the problem here. I agree with you about 3rd party suppliers of this gear. The packaging and specs of the FlipSky were just too tempting. My calculations of torque and maximum RPM really require a 16S setup but the Trampa 75/300 boards are quite physically large. The FlipSky parts were the only ones that ticked both boxes. I think I'll just bite the bullet and grab a Trampa 75/300 and be done with it.
TheFallen:- That's interesting, I had never heard of those ESCs before. Interesting reading, even if they aren't available.
I just did one last test to make sure the issue wasn't with the motor. I ran the same test (open loop at 10/20/30/40A) with a VESC 4.12 from a different project. Buttery smooth! No sign of faults or screeching. This really confirms that the FlipSky just wasn't up to the job.
I think it's time to get out the wallet again.
Thanks again Vadicus / TheFallen for your help.
Change the gate resistors to 20R and increase the deadtime accordingly... don't ask me how I know
I assume its this one? https://flipsky.net/collections/electronic-products/products/flipsky-fse...
Look familiar? https://vesc-project.com/comment/3401#comment-3401
You're absolutely right--that's the one. I've just finished reading through that thread--fascinating reading! Thanks for pointing me towards that.
So let me just get this straight:
Damn I wish I had known this at the start. Not least because I wish my money had gone to you instead of FlipSky!
My next step was going to be probing the gate drivers before I sent my MOSFETs into orbit!
Unfortunately, by the time you had posted that link I had already ordered a Trampa ESC, but I will keep the V3 design in mind for the next project (I'm sure there will be one!). I like the packaging of the V3 device and having the 80V option is really nice. Having the power and phase wires coming out of the same side is especially nice for me because putting it in a waterproof box with all of the grommets exiting via the bottom where water ingress is reduced is much easier.
Also: I'm glad you moved away from those slightly insane MOSFET packages--I didn't fancy my chances of reflowing one of those without a stencil.
The problem with copycats is that they will always be a few steps behind not to mention they don't know what exactly they are doing as all the energy is spent on copying rather than innovating.
NextGen FOC High voltage 144v/34s, 30kw (https://vesc-project.com/node/1477)
Hi
can you tell me where you found the schematic of 75_300... I'm trying to use 75100 pro v2 for ABI encoder detection but it is not detecting... after searching forums.. i found that i need to change some resistors that is going to Hall sensor pins on motor controller..
so a schematic would be really help ful
Thejesh