Hi everyone,
First of all - I want to thank asll VESC community for such great project and forums, where I can find answer for most of questions.
I have a working VESC project based on Paltatech 150 kw project (https://vesc-project.com/node/144 ) I succesfully managed to achieve max power of 14 kW, however, the motor I am using is an aviation 30(and 60) kW BLDC motor and I need to go further. I am now debugging the power stage since I have DRV FAULT after the power rises above.
The motor and controller will be used in aviation project so yes, VESC is used in aviation too :D
I've tried the configuration of Sensored and Sensorless BLDC, I can use hall sensors.
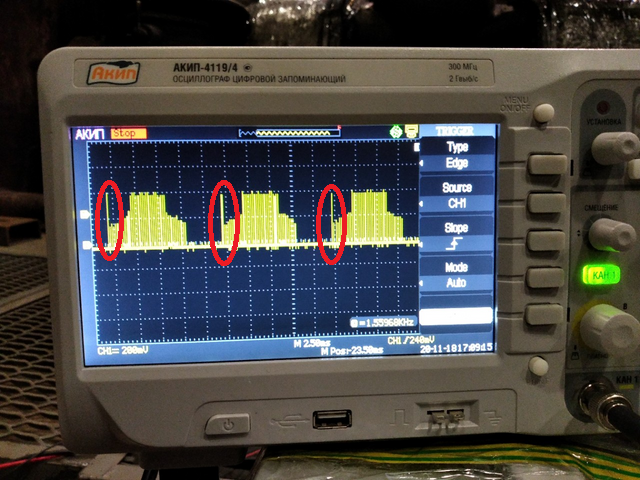
However, I am still a bit confused about the pictures below. The signal is gathered from the common ground and one of 3 phases. At the commutation, the voltage spike comes first at zero-cross. Is it okay or not? What causes such surge? How to overcome such voltage surge, since it causes current spike too - which prevents motor from normal running at ~22000 ERPM. The spike persists both on sensored and sensorless mode.
I can't use FOC because of the idea of project.
https://i.ibb.co/McCbwN4/image.png
https://i.ibb.co/N1jv7g5/image.png
{kind=link}
{kind=link}
I can publish any other materials if needed :)
Best regards,
Fedor.