Hey,
Can somebody briefly explain me how VESC observer works in FOC mode.
The problem: everything works great when motor is driven. But when freewheeling the observer goes crazy.
Graphs look nice when driven and observer works correctly based on current, but when freewheeling graphs look like that: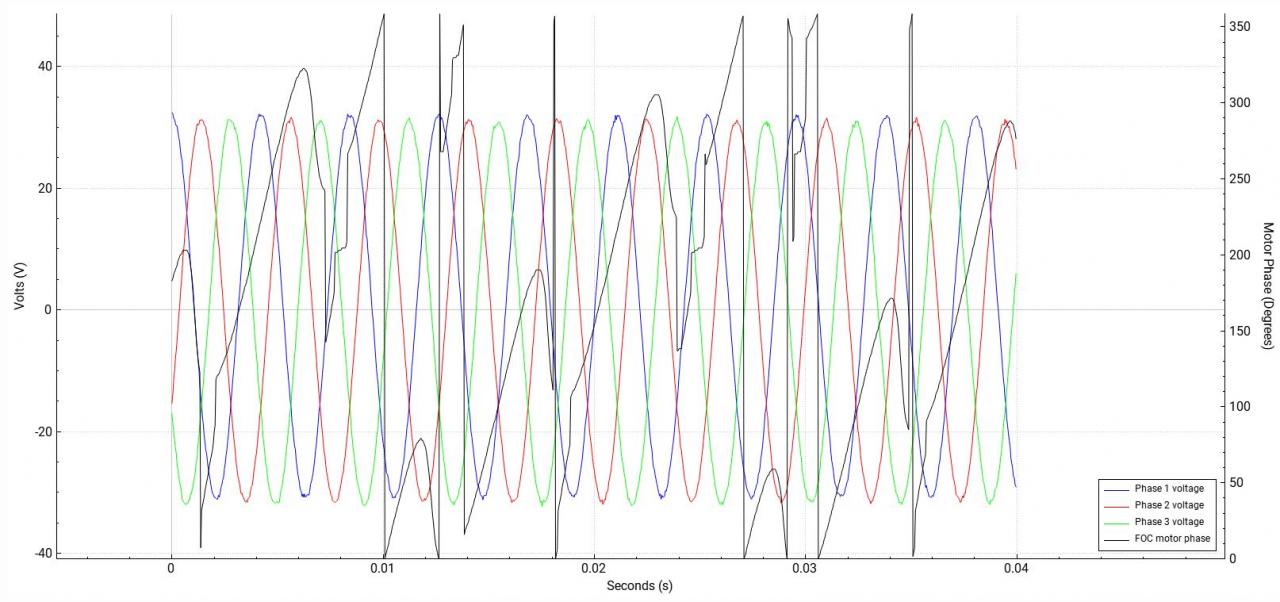
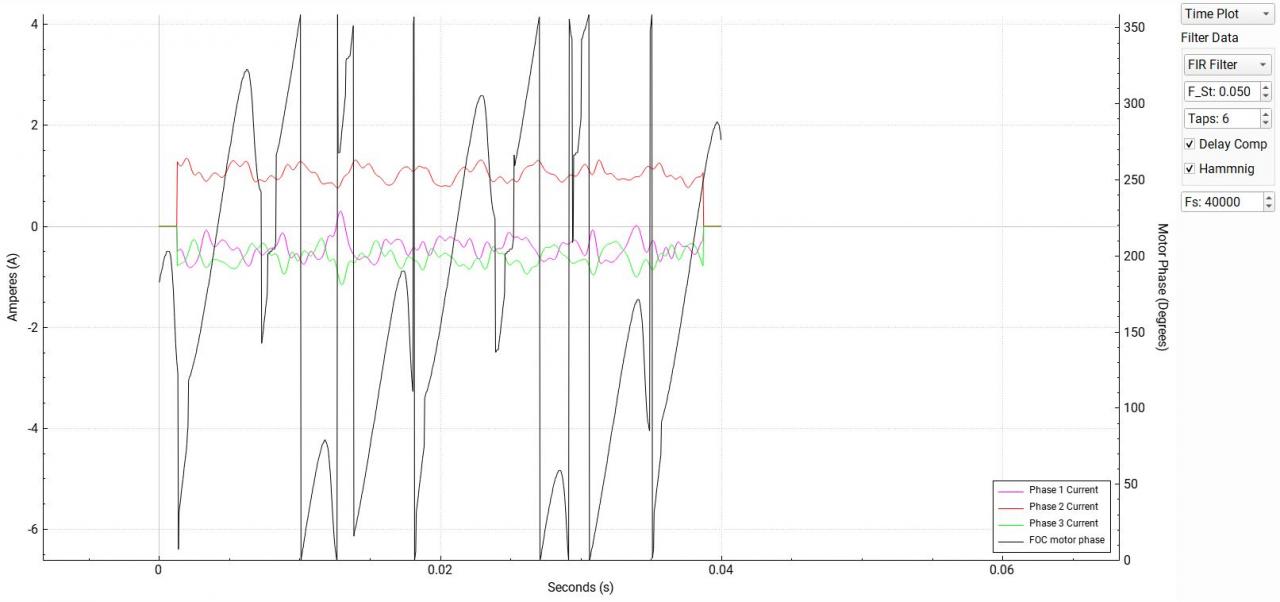
If I understand correctly observer should switch from current to voltage when freewheeling, but in my case it seems like its not happening.
Am I understanding the working of observer correctly? Is there any parameters that could resolve the issue?
I am running custom hardware that has HAL current sensors, therefore the low current measurements are not as accurate as original hardware.
Thanks!
I did a bit more testing. When motor is driven even at very low amps, example 0.1, then tracking works perfectly. As soon as motor is released, tracking is lost. I tested it on pretty large hub motor.
Anybody got any ideas?