I've been testing my design (https://vesc-project.com/node/1477) with large hub motors, QS205 in this case, and I noticed that if I twitch the throttle to fully open, an over current fault is generated. The motor goes full speed and then controller suddenly cuts out. If I slowly advance the throttle, this doesn't happen: the motor spins at full speed without problem.
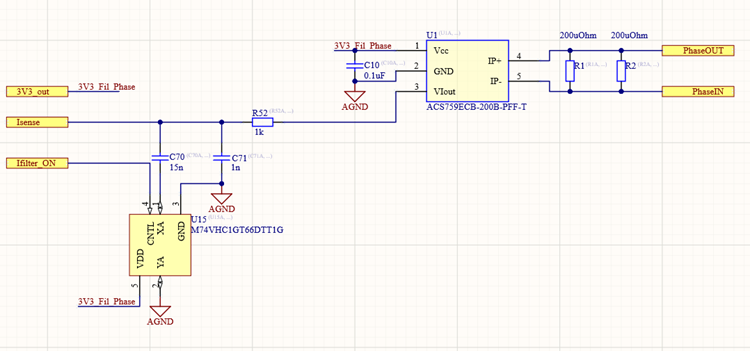
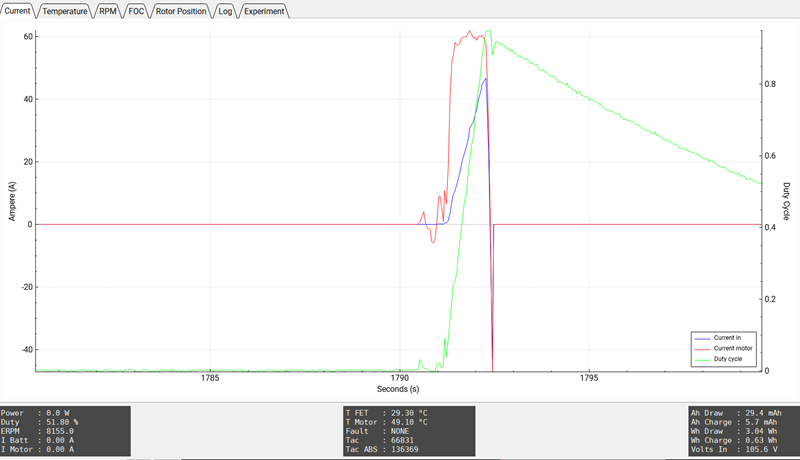
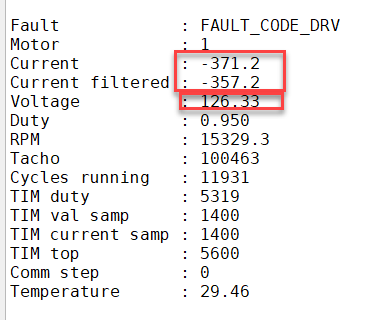
I am almost certain there must be a problem with my current sensor circuit, most likely, filtering. I use 1k/16nF filter that should provide about 10kHz cutoff frequency. I don't know if I have to be more aggressive with filtering. Another thing I noticed as seen on the pictures below, when the fault is triggered, the voltage goes up by 20v above the battery voltage. It seems like maybe the BackEMF is messing things up. This is not happening on inrunners (non-hub motors). I can twitch the throttle on those all day long and they run fine.
Any ideas how to fix this?
Schematics and screenshots of the spike are below.
Update: installing the latest 5.02 fixed the issue.
Bonus: MTPA works pretty well with an IPM motor. Here is a demo:
NextGen FOC High voltage 144v/34s, 30kw (https://vesc-project.com/node/1477)
I also had the idea to do this but couldn't afford it. Have you found its error yet?
slope game