Hi,
I am using BLDC sensored mode with my hoverboard motor. I am using the stock defaults, because I have not been able to get BLDC detect to work at all. no matter what I set, the motor just cogs, or spins up for a fraction of a second then cogs.
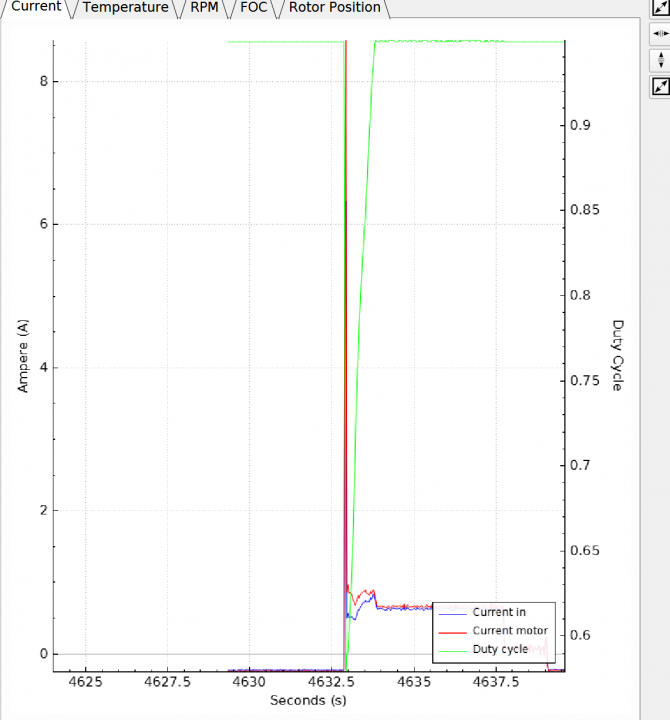
Using the stock settings and current control mode, the motor does spin smoothly. The problem is that I am seeing a massive overshoot in current starting the motor only sometimes. I attached a graph.
Any ideas? I am using fully stock settings. I check my hall signals, they look clean. My battery limits are also fine (32Vin, cutoffs are set to start at 8 volts)
Some other notes:
* Using a Torque VESC from Esk8
* Latest FW from git
* Hoverboard 6.5" motor
For third party, VESC technology based devices it is hard to tell what is going on with them.
It is probably a cheaper two shunt design, with the shunts placed on the battery side, not the motor side.
Please have a look here: https://vesc-project.com/node/403