Hi, my BLDC servo motor has both internal hall sensors and an incremental encoder (see info below)
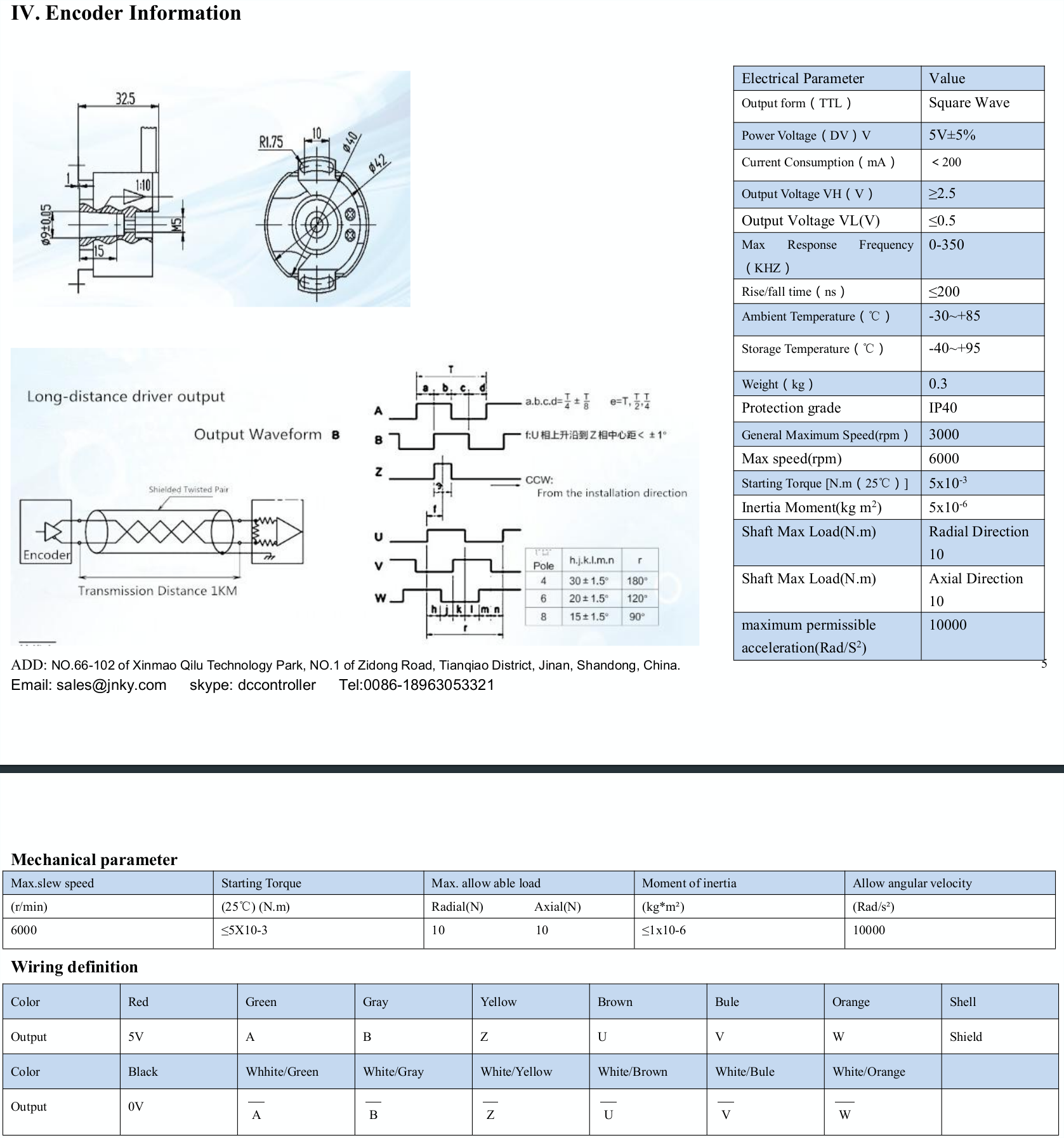
Can I connect both sensors to Vesc (4.12 HW)? Hall sensor is clear but how do I connect the quadrature encoder (to P3)? It's just A,B,Z no SPI.
Can I use the hall information for initial positioning and then go with the more precise incremental encoder?
I must avoid an index search on startup as that would move a big robot without control.
Cheers
A -> H1
B -> H2
Z -> H3
Instead of doing an index search each power - up you can: