Hello,
I want to issue RPM commands through UART, but i would like the VESC the limit the amount of acceleration it uses because I have observed my wheels tends to slip on the floor depending on the load on the cart i'm trying to pul, in particular while turning left or right (vesc powers a 2 wheel drive vehicle which then pulls a some sort of a cart).
I did not find any obvious way to limit the acceleration, except maybe for "positive ramping time" (acceleration) / "negative ramping time" (brake)
Except toying with the PID values or using those "ramping times", is there any way to limit the acceleration to prevent wheel slippage?
thanks
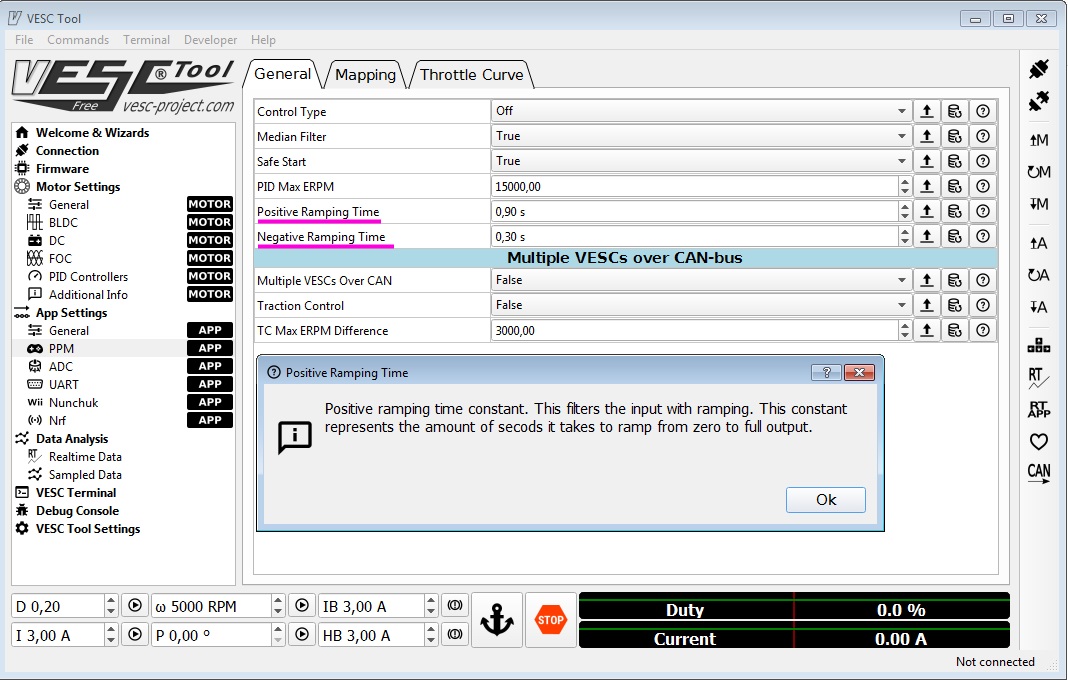
As far as I know there is no other value you could use. The topic acceleration control is one of the things that is on Benjamins list of ToDos. Its not trivial though and needs a bit of extra spare time to implement. Some hurdles have been taken already. Your current options are to decrease the output power of the motor, use throttle curves and ramping time.
Use ramping time or decrease motor current, which will reduce torque and slip less.
ok. thanks for your feedback. indeed I agree, trajectory planning for acceleration is something that does require thinking and time :)