HI,
I have an E-bike motor with hall sensors, and I just detected and installed FOC mode. A little testing shows that sometimes it doesn't start. As this is just for a test, that is fine with me.
I then made the motor turn and got a sample from the "sampled data" tab. What suprisded me is the quality of the BEMF that was measured, and the wrong-ness of the FOC position estimation....
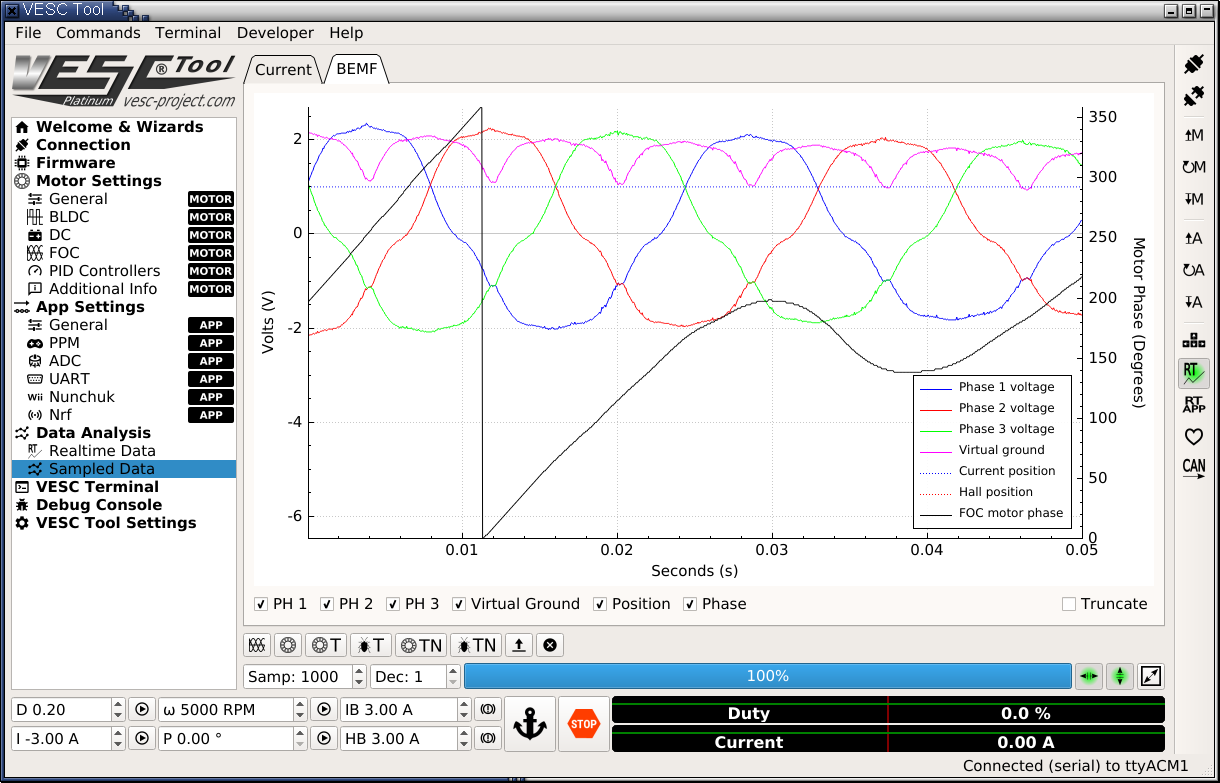
This would explain why the duty-cycle-following at low RPM sometimes drops to the opposite sign. But the "source data" looks quite good to me, so why would the observer guess that the motor is running backwards?
Did you ever figure this out? I have similar issues where the motor will start 90% the correct direction, but 10% of the time it will cog backwards at a high current.
Those BEMF plots look horrible. Starting issues are normally when your motor settings are wrong. Put some resistance on the motor so it is hard to start and tweak the settings till it works.
The BEMF signals look "very nice" to me. The three phases are nicely sinusoidal. It is that the phase detection that doesn't work that suprises me.
No, I have not figured things out.
How did you get that bemf plot? Shouldn't the bemf plot in foc be a mess of pwm spikes?