Hey everyone,
I’m working on a project where I need to control two motors independently using a Raspberry Pi 4b, and I could really use some guidance to avoid frying anything!
Here’s what I’m trying to achieve:
- I plan to control both motors independently.
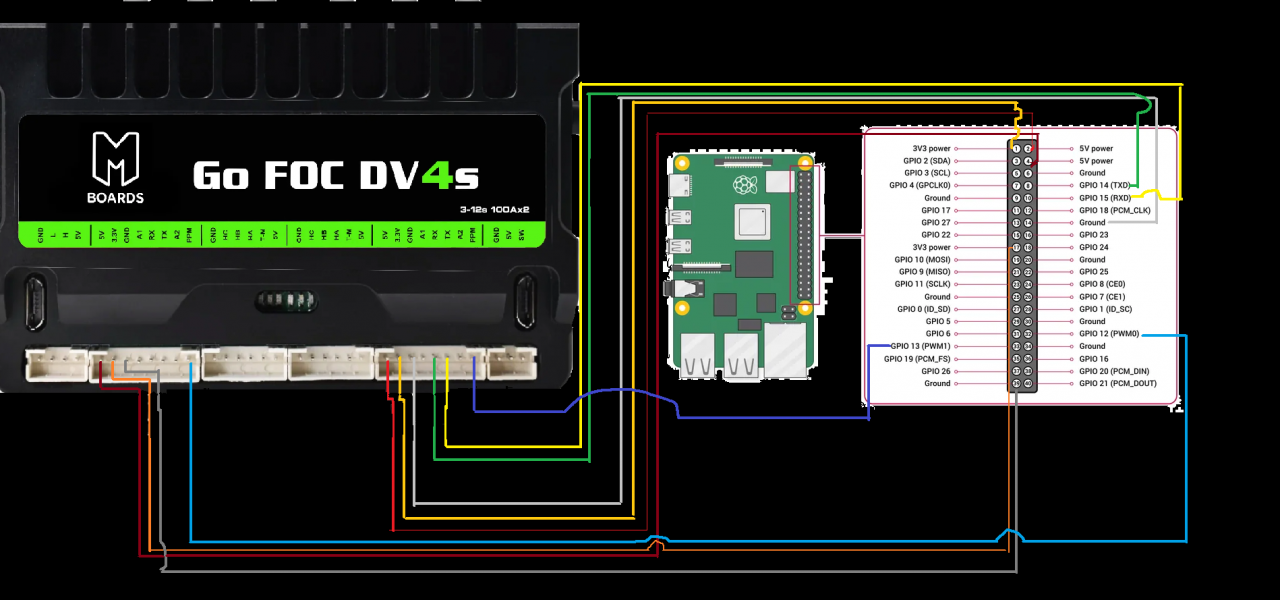
- The Raspberry Pi has two PWM pins, and I was thinking of wiring them directly to the PPM input on the ESCs (since PWM and PPM are essentially complements/inverts of each other, right?).
I’m a bit confused about how GPIO14 (TXD) and GPIO15 (RXD) work though. From what I understand, these pins natively use UART, and the other GPIO pins don’t support UART without additional software. So, here are my main questions:
- Can I use the same TX/RX signals for both motors, or do I need separate lines for each motor?
- Do I need to do anything with the A1 or A2 pins on the ESC?
- Am I missing anything obvious, or making any mistakes in my thinking here?
For context, I’m using a https://www.mboards.co/collections/escs/products/makerx-mboards-dv4s-blu... ESC and have the Bluetooth module connected to 5V, GND, TX, and RX. I’m not sure how to connect to the module for control, or if there are other things I need to set up.
I've been searching for answers for hours and would really appreciate any help. Thanks in advance!