Hi all, I'm planning to use a 5065 140kv motor to power a custom designed geared (10:1) powered rope ascender and I was wondering if it's possible to setup a vesc like the following.
Basically I want to power the motor for ascent and when release the throttle it stops and holds me where I am on the rope.
h
Then if I flip a switch and press the throttle (or use a joystick instead of ebike throttle so it has a centre position instead of requiring a switch) it releases the hold effect allowing it to freewheel but in reverse down the rope due to gravity and uses regen/motor braking to control the descent speed?
I have seen I can set up a vesc so that the motor can rotate under power either direction with a cheap spring centered joystick potentiometer so I'd like it to do that but with it holding the brake to lock up when potentiometer is central and releasing once not central with unpowered freewheeling in reverse.
Is something like this possible or is there something close enough that would do the trick? Could I just have it spin the motor either direction but effectively make it so one direction is much slower and since gravity is working with it in that direction it uses the regen/motor braking to try and maintain the slow speed whilst gravity tries to accelerate it?
Thanks in advance for any help!
Sure that's possible. If you look for "vesc ewinch" on YouTube you will find a solution that could be close to your needed function. Also take a look at LISP for VESC.
Link to forum post: VESC help offered for private persons and companies
Website: www.electricfox.de
Well I happened to come across this (https://youtu.be/lmEMhk-sdbU?t=6m1s) and what he has done with the arduino is exactly what I'm looking to do within the vesc if possible, where neutral to forward on a joystick spins the motor like normal but neutral to reverse does the braking but it is inverted so 100% brake is at neutral instead of at max reverse position on the joystick.
Is it possible to reverse the braking percentage setup like I need or code it into the vesc with lisp in a way someone as new as me can understand?
He even shows the arduino code and it appears he uses it to convert the joystick signal to ppm input.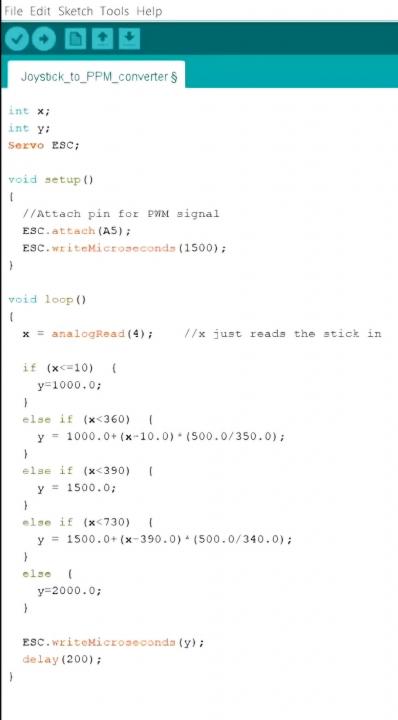
I was just thinking, would it work if I setup the adc1 where instead of setting it like normal for forward/neutral/brake adc1 for example 3v forward/2v centre/1v brake I set it inverted for centre/brake so as soon as I release the joystick and it reads the voltage at the centre of 2v but it thinks the joystick is being held back for brake so gives maximum brake but as soon as I move it backwards it thinks it's moving towards neutral so releases the brake.
Also came across this https://vesc-project.com/node/258 and sounds like position control would work for my purpose but not doable with a standard sensored motor such as a 5065 I'm using.