What does the current sense look like? If you can see the BEMF in FOC mode you must have filters on phase voltage sense, as TechAUmNu said if you have them on phase current sense as well it can cause problems. From what I understand phase current sense has strict requirements in terms of timing and filters can introduce delays.
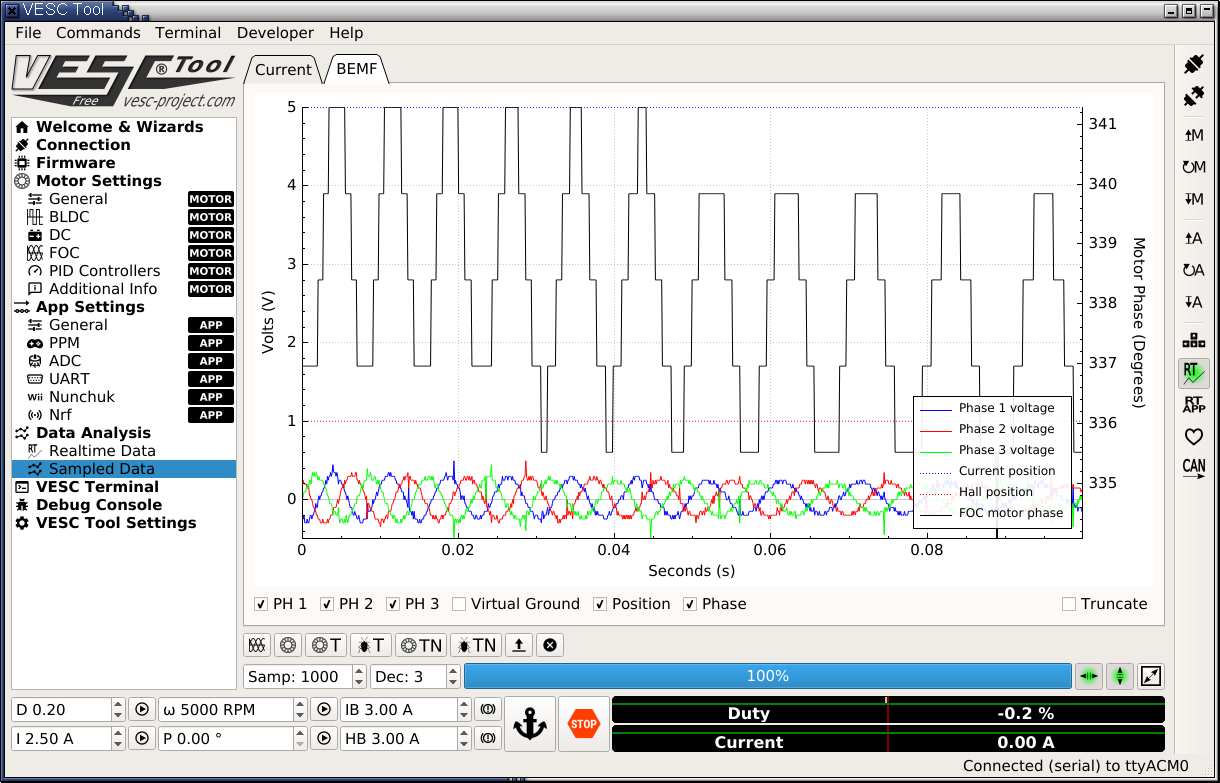
This is with a hand-shove to turn the motor. No power being applied to the motor. Hmm. The motor phase degrees are only bumping up and down a very small amount. I thought I was seeing BLDC phase state going 2-5 and later 1-4. or something like that.
I'm hesitating to wire up the big motor. The above test was done with just a small DT750 and a small prop attached.
On FOC and "foc_openloop 2 60" the motor slowly wobbles back and forth instead of turning.
This is now with foc_openloop 2 60 .The currents look a bit noisy, but you have to keep in mind that this version is scaled to be able to measure 200A...
I don't understand what makes the difference between the wobble and the more-or-less-steady turning that it does now.
I just moved the scope probes and it changed to wobble mode again. It is REALLY driving the motor to the "wobble", as I cannot get it to turn by helping it along with my finger.
OK. Found it... Something with the current sensor wires. Touching those wires caused it to switch a few times between the wobble and the rotating. And then the third behaviour: Draw so much current that the power supply tells: "No more" and lowers the voltage into the undervoltage range.
I had a problem similar when I accidently put capacitors on the phase sense lines.
What does the current sense look like? If you can see the BEMF in FOC mode you must have filters on phase voltage sense, as TechAUmNu said if you have them on phase current sense as well it can cause problems. From what I understand phase current sense has strict requirements in terms of timing and filters can introduce delays.
This is with a hand-shove to turn the motor. No power being applied to the motor. Hmm. The motor phase degrees are only bumping up and down a very small amount. I thought I was seeing BLDC phase state going 2-5 and later 1-4. or something like that.
I'm hesitating to wire up the big motor. The above test was done with just a small DT750 and a small prop attached.
On FOC and "foc_openloop 2 60" the motor slowly wobbles back and forth instead of turning.
This is now with foc_openloop 2 60 .The currents look a bit noisy, but you have to keep in mind that this version is scaled to be able to measure 200A...
I don't understand what makes the difference between the wobble and the more-or-less-steady turning that it does now.
I just moved the scope probes and it changed to wobble mode again. It is REALLY driving the motor to the "wobble", as I cannot get it to turn by helping it along with my finger.
OK. Found it... Something with the current sensor wires. Touching those wires caused it to switch a few times between the wobble and the rotating. And then the third behaviour: Draw so much current that the power supply tells: "No more" and lowers the voltage into the undervoltage range.
Is the voltage too low for it to track well? It's noisy and less than 1v is pretty low. Does it pass motor detection?
The noise is pretty extreme, here is one of my ina240a1 0.5mohm builds with no filtering for comparison.
Yeah my currents with 0.08mOhm and 20x ina240 are fairly noisy, hall sensors are a good idea for low speed.