I have an old scooter, which I decided to change the controller for the VESC (the original controller is one of those very generic Chinese ones - it's working).
The problem is that I don't have much information about the motor.
The motor even spins when the wheel is lifted, however, with the weight of the scooter itself, it does not have the strength to start, only pushing.
Some motor and battery specs:
Motor: 800w, 48v, 10 inch, 30 pole, sensorless.
Battery: 13s8p 20Ah (18650 Li-Ion)
Using the Wizard "Setup Motors FOC", the motor runs perfectly, and using the ADC or even the VESC tool, everything works perfectly (when the motor is lifted)
Below are the settings detected by the wizard: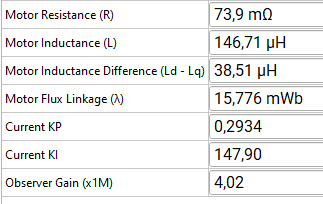
I saw that the ideal was to configure it to use HFI (because the motor is sensorless), however, I could not configure following the only tutorial I found (youtube tutorial)
This was the best I could get, using 41V on HFI Start Voltage, HFI Run Voltage, and HFI Max Voltage. Beyond that I didn't notice any improvement.
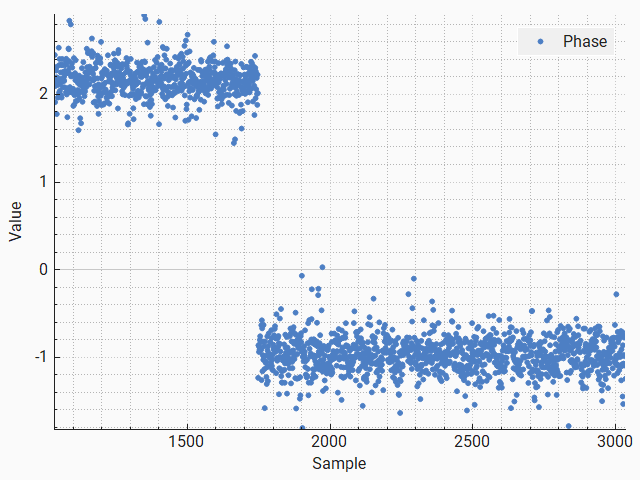
(The motor wasn't spining, it just made a strange noise when the graph changed.)
In the end, the result is always the same (with or without HFI). I can hold the scooter with one hand, even applying 25A to the motor (checked by Real Time Data / Current)

I even thought about using an external sensor, but I don't know how to do that. The only reference I found is from a site where the image links are broken (https://danielz.uk/how-to-add-external-hall-sensors-to-a-turnigy-sk3-out...)
I made a little progress by setting the engine to BLDC, and changing the startup boost to 0.3. But sometimes the scooter goes backwards instead of forwards, other times it goes forwards. But even so, it only supports the weight of the scooter. If someone climbs up, the engine doesn't have enough power.
try just bldc mode first.