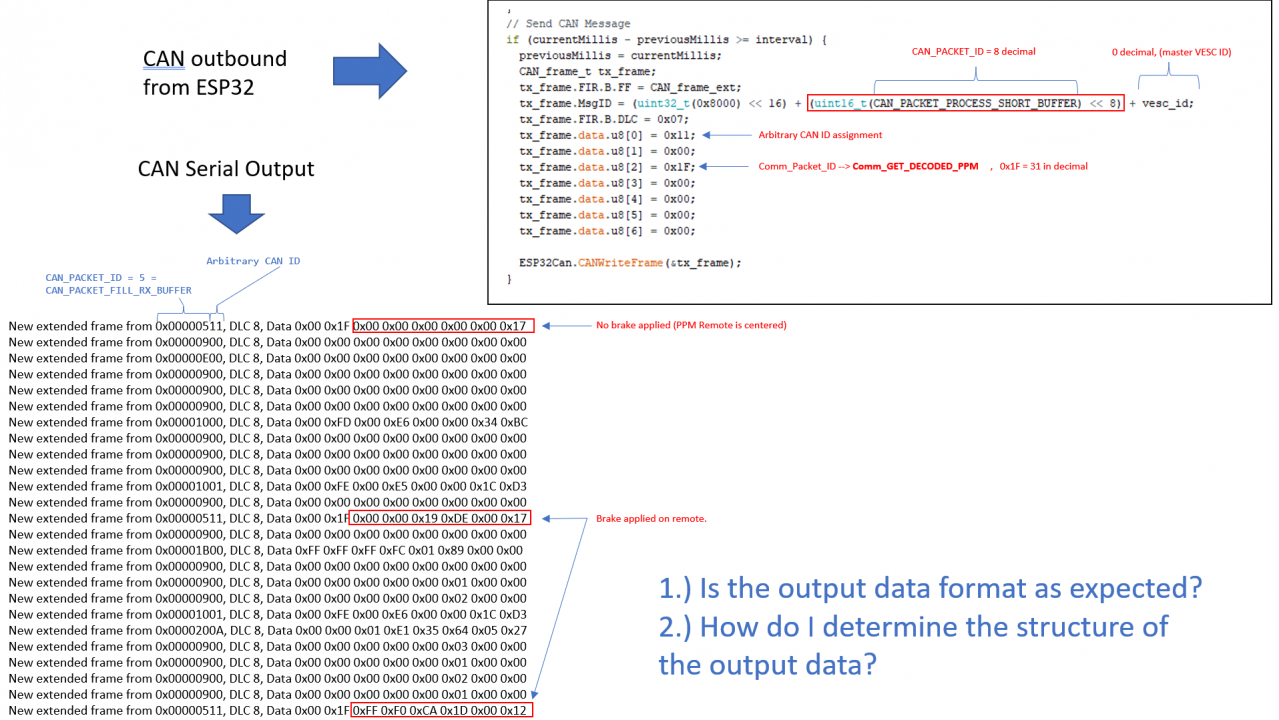
I believe I am getting a VESC response now with PPM information, though I am having trouble understanding the output format. My short Arduino code is below.
My primary question is, have I gone about this correctly to read the PPM info, is the output as expected, and can anyone advise of the parsing format or where I can dig to find it?
#include <Arduino.h>
#include <ESP32CAN.h>
#include <CAN_config.h>
CAN_device_t CAN_cfg; // CAN Config
unsigned long previousMillis = 0; // will store last time a CAN Message was send
const int interval = 500; // interval at which send CAN Messages (milliseconds)
const int rx_queue_size = 10; // Receive Queue size
uint8_t vesc_id = 0;
uint16_t CAN_PACKET_PROCESS_SHORT_BUFFER = 8; //From CanBus.H header typedef enum list kicks out --> CAN_PACKET_ID;
void setup() {
Serial.begin(9600);
Serial.println("Basic Demo - ESP32-Arduino-CAN");
CAN_cfg.speed = CAN_SPEED_500KBPS;
CAN_cfg.tx_pin_id = GPIO_NUM_22;
CAN_cfg.rx_pin_id = GPIO_NUM_21;
CAN_cfg.rx_queue = xQueueCreate(rx_queue_size, sizeof(CAN_frame_t));
// Init CAN Module
ESP32Can.CANInit();
}
void loop() {
CAN_frame_t rx_frame;
unsigned long currentMillis = millis();
// Receive next CAN frame from queue
if (xQueueReceive(CAN_cfg.rx_queue, &rx_frame, 3 * portTICK_PERIOD_MS) == pdTRUE) {
if (rx_frame.FIR.B.FF == CAN_frame_std) {
printf("New standard frame");
}
else {
printf("New extended frame");
}
if (rx_frame.FIR.B.RTR == CAN_RTR) {
printf(" RTR from 0x%08X, DLC %d\r\n", rx_frame.MsgID, rx_frame.FIR.B.DLC);
}
else {
printf(" from 0x%08X, DLC %d, Data ", rx_frame.MsgID, rx_frame.FIR.B.DLC);
for (int i = 0; i < rx_frame.FIR.B.DLC; i++) {
printf("0x%02X ", rx_frame.data.u8[i]);
}
printf("\n");
}
}
// Send CAN Message
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
CAN_frame_t tx_frame;
tx_frame.FIR.B.FF = CAN_frame_ext;
tx_frame.MsgID = (uint32_t(0x8000) << 16) + (uint16_t(CAN_PACKET_PROCESS_SHORT_BUFFER) << 8) + vesc_id;
tx_frame.FIR.B.DLC = 0x07;
tx_frame.data.u8[0] = 0x11;
tx_frame.data.u8[1] = 0x00;
tx_frame.data.u8[2] = 0x1F; // Comm_Packet_ID --> Comm_GET_DECODED_PPM , 0x1F = 31 in decimal
tx_frame.data.u8[3] = 0x00;
tx_frame.data.u8[4] = 0x00;
tx_frame.data.u8[5] = 0x00;
tx_frame.data.u8[6] = 0x00;
ESP32Can.CANWriteFrame(&tx_frame);
}
}