I have a FSESC4.2 with 2 hoverboards hubs . FOC mode and 12s battery ... good détection , smooth running ..
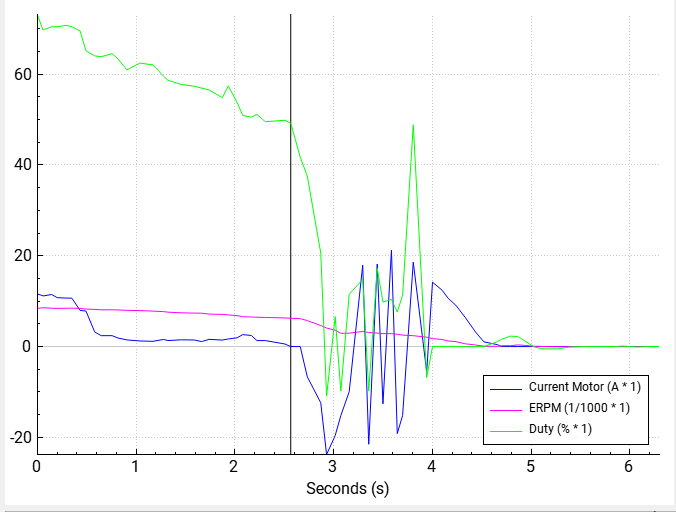
But a growl under heavy braking. I made a log of each vesc. the master (where the receiver of my vx2 is connected) has a strange behavior. from the vertical line, soft braking (no noise) and then hard braking. we see the duty and the motor current that delirious. it is proportional to the braking / regen current. currently at -25 / -20A. I need these values to brake properly. An idea ?
Previously on a Lingyitek esc, these hubs did not brake much, but did not growl. on vesc they brake very well. but it makes noise.
2 logs are different short runs . I can't log the 2 vesc together with my uart BT module .
Here the Master :
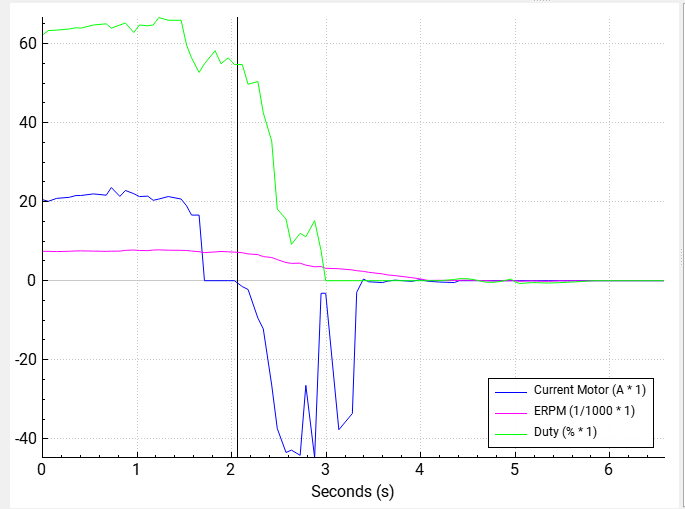
and the slave :
my motor parameters :
141mOhms
299uH
18mWb
KP 0,3
KI 141
observer gain 2,9
Kv 18~20
on this video,braking at 3 and 8s.
another log ..
vertical line is the start breaking .
in fact he problem is mainly on slave ESC .but visible on master too.
you see positive current motor spikes while braking , battery current negative and crazy duty spikes ?
don't understand ..
master :
and slave :
same noise with others hoverboard hubs . same Kv but more windings and bigger magnets ..