Hey All ,
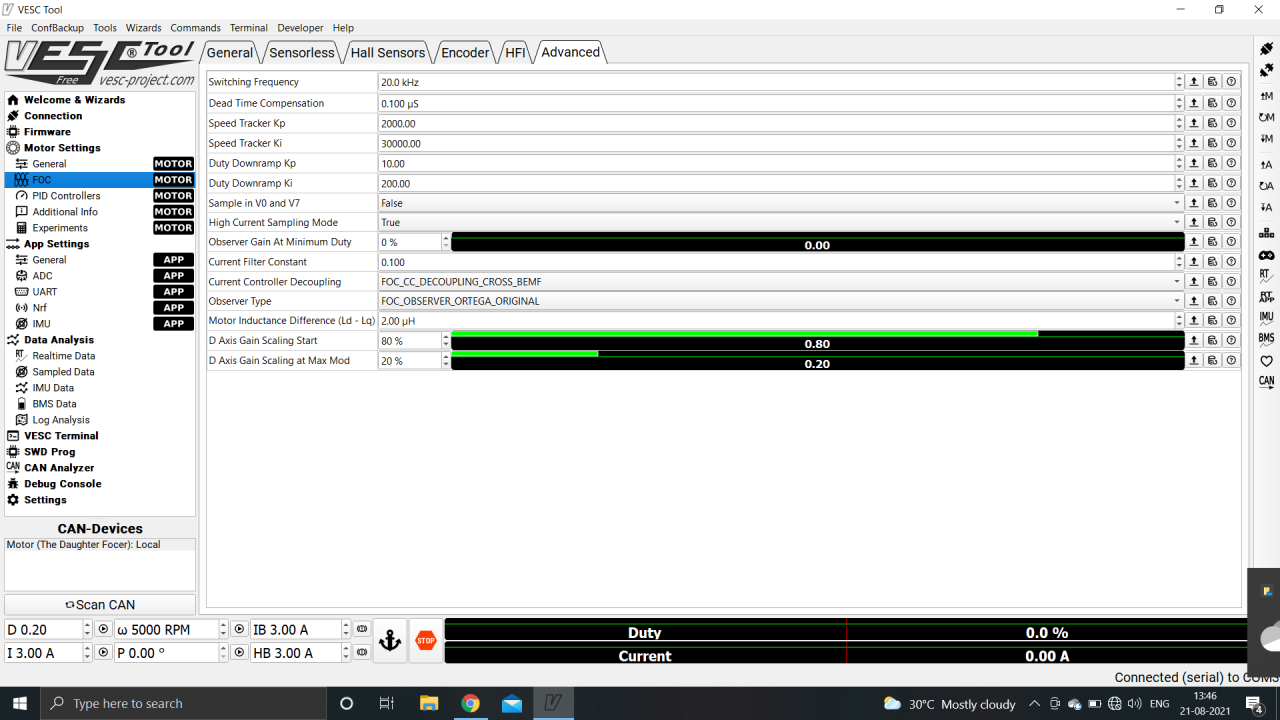
I recently bought a cheap Chinese Vespa looking Scooter with hub motor. i removed the stock controller and swapped it with Besc-g2 and after tuning for foc i ran into an issue where the motor gives sudden jerk and loud band noise with loss of power at sensor-less switchover RPM .I am using current control. I tried many different things like changing Dead time Compensation, Sensor-less rpm , observer gain, ramping time, tried detection with high current for both motor and hall sensor, foc coupling type , high current sampling , and basically every settings i can but results are not that good. Motor works perfectly Fine with stock controller. I also tried to do the HALL_ANALYZE 30 command in terminal and it showed the error of only 2 degree and i was able to run many in-runners with 30-50degree errors perfectly fine with the same besc. if i try to start the scooter smoothly with low current(low throttle input) the jerk is small and after sensor-less switchover motor runs very smoothly.
Any help will be greatly appreciated. I am attaching some pictures that might help.
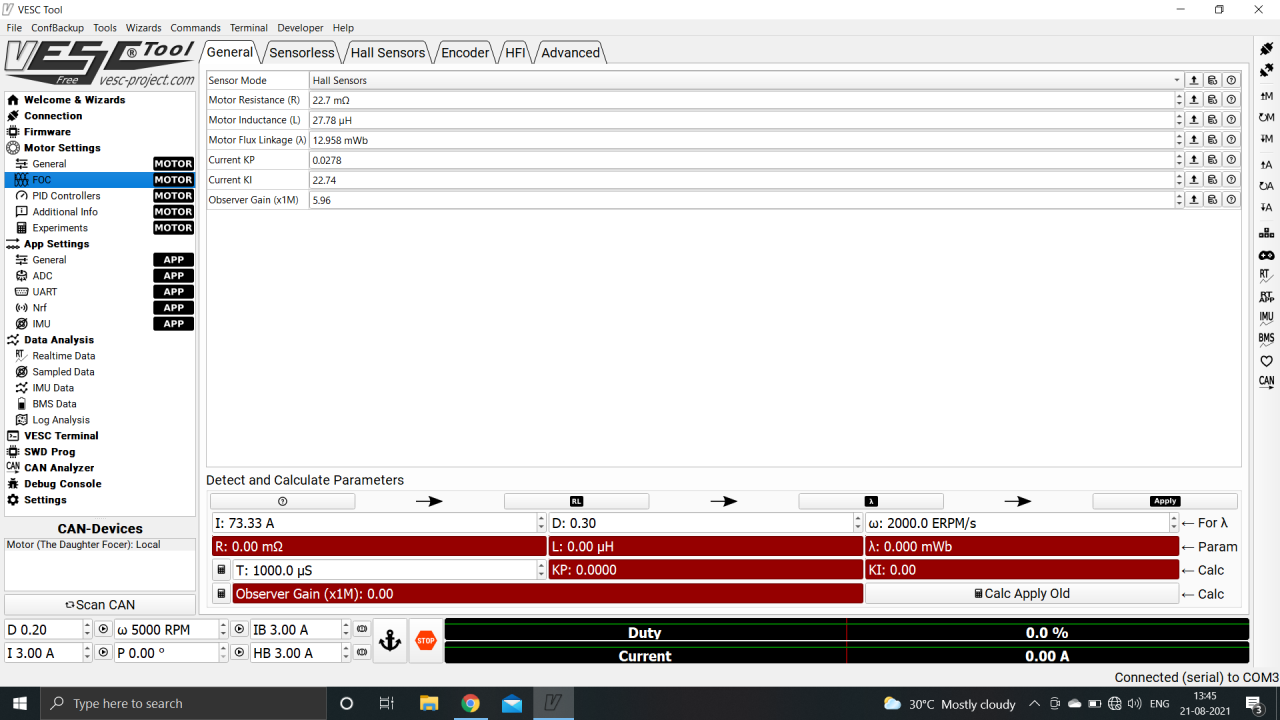
Try reducing the motor resistance by 25% from the value it detects then click "Calc Apply Old" at the bottom right of the page to update the KP and KI values.
hey Techaumnu , i tried that and it made things worse what happens after reducing the R is when switchover happens motor squeak and then sudden power loss and after switchover lots of vibrations.
hackey