Hi everyone
I have used some days trying to get some control over my VESC using a CAN tranceiver, for now I'm only looking on the status messages.
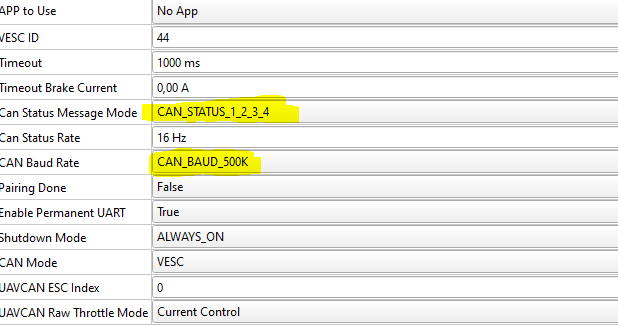
The issue is that no matter what I do, its payload is all 0's, and even when selecting STATUS 1-2-3-4-5, its only keeps sending the same message.
Am I missing something ?
Another wierd thing, is that its not respecting CAN Status Rate, its just spamming the bus

I found the solution, so to help others:
VESC will NOT work as intended when it have not received any CAN package, e.g. lonely on the bus.
Then it will spam the bus with the same message over and over again, not respecting update rate or any other settings, and just repeat STATUS 1 message.
When it receives a package, it will now change mode (maybe init the state machine?), and send status 1-5 with the correct update rate and so forth.
Hope this can help some one else :)