Hi Everyone!
I love the VESC project and have been at the point of creating an implementation several times. Recently another good excuse came up so I went to work.
Design goals:
- Up to 12S LiPo / 15S LiFePo input voltage
- 15-20A continuous current, 30A would be ideal
- Supporting sensorless (FOC / HFI), Hall and encoder setups
- USB and CAN host interfaces
- Small enough to replace BLHeli boards without having to drastically chop a robot up
- Mounting features (holes & pads)
- Host connectors with retention
- Option to switch FETs for higher voltage or current ones (or cheaper ones).
The current implementation borrows from the different VESC 6, 75 and up designs, and also from some 3rd party schematics (sorry, don't remember which ones):
- In-phase current measurements using the INA240A1PW and 0.2mOhm shunts
- TI DRV8320RS driver and +5V supply
- LP5907UVX-3.3 LDO for VDDA
- TPS62849DLC buck converter for +3.3V (with switching interrupter to silence it during analog reading, if required)
- DirectFET L8 IRF7749L1 33A MOSFETs
- 50 x 30 mm 4 layer board with 2Oz outside copper and 1.5Oz internal copper, dual side components
The board schematic: ESC12S30.pdf
The top side will have all MOSFETs, the shunts and caps: 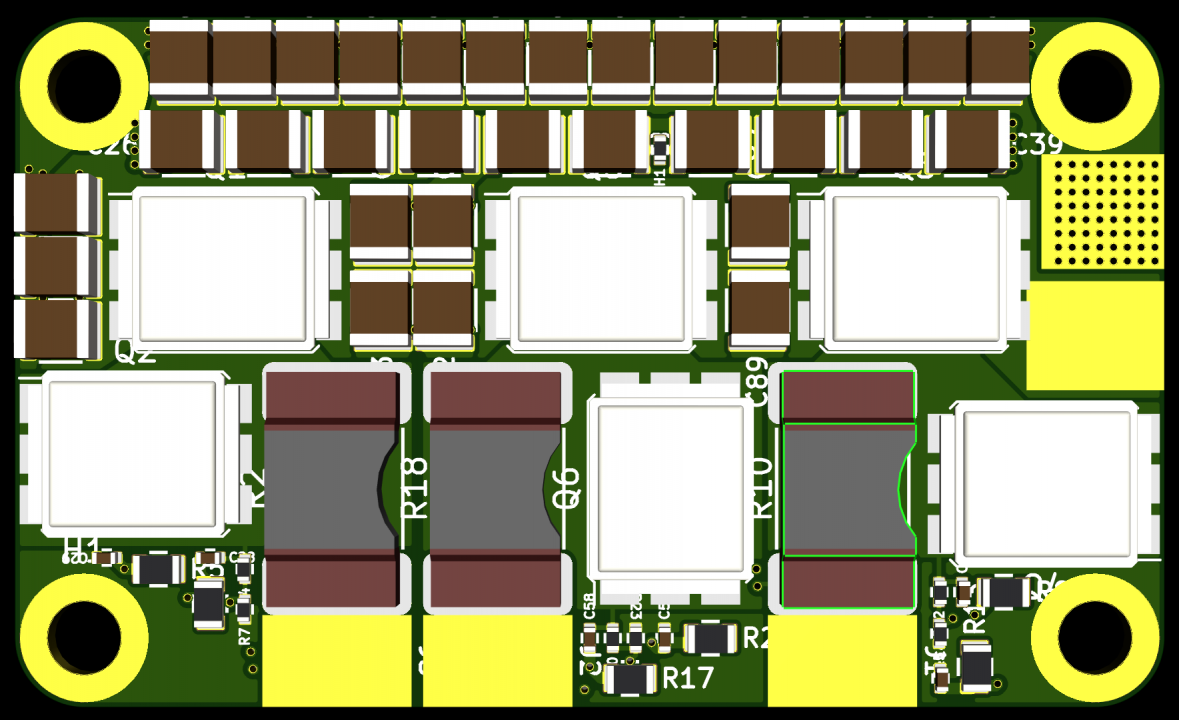
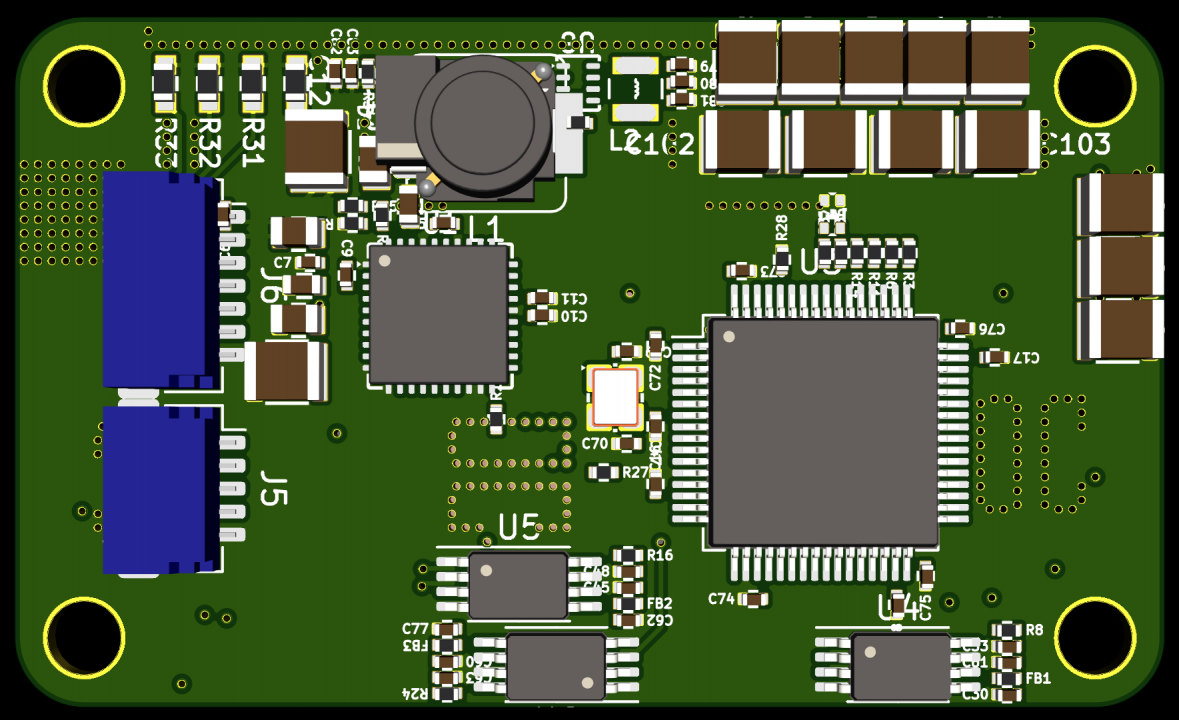
The bottom side is still very much a work in progress, but the general direction I'd like to take is pretty clear I think:
I'd love to hear any comments, critiques and gotcha's!