Hi all,
i have a custom PCB based on Benjamins 75/300 schematic running. I use it in a underwater diving scooter. I started with some tests in FOC mode, but every time the duty cycle reaches 65% the motor stops with a loud squeaking. I disabled my custom app and control the motor with vesc-tool.
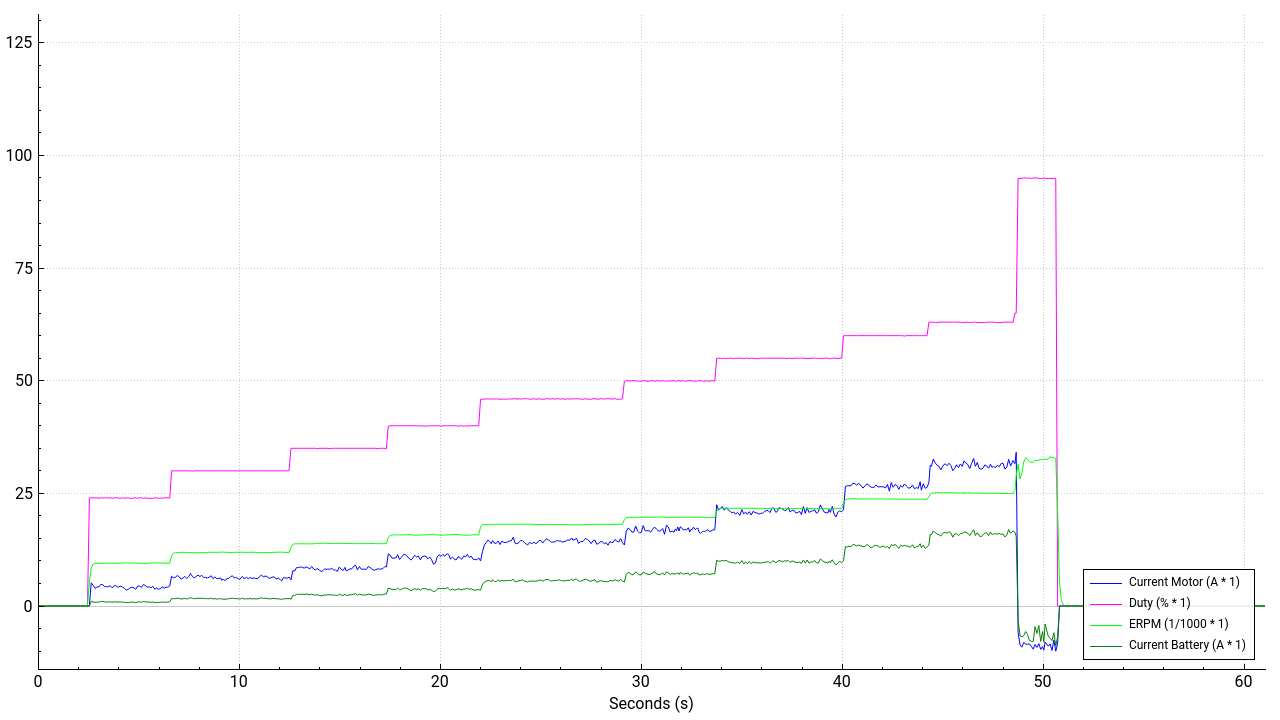
the behavior is the same, independent if i use duty cycle, current or rpm control. The "jump" to maximum duty cycle occurs right after slightly increase duty/current/rpm via vesc-tool.
Has anyone an idea what this jump is ?
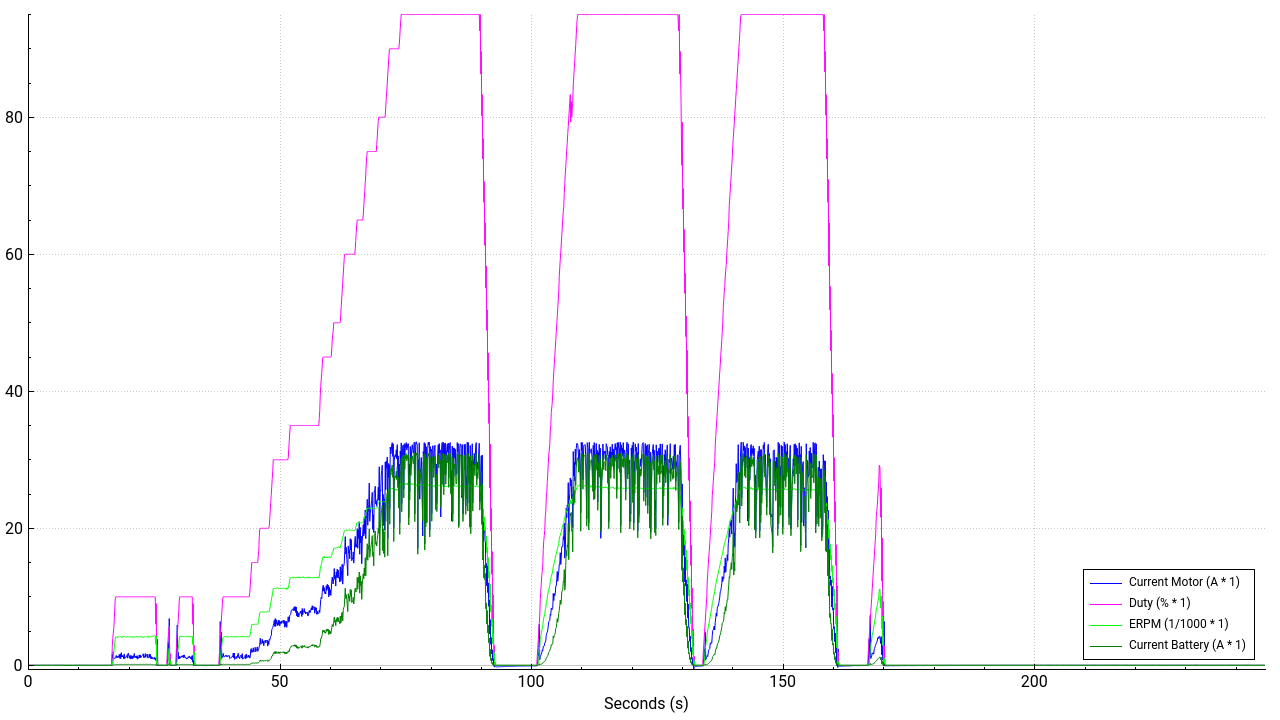
In BLDC Mode, everything is fine:
But BLDC mode is much louder and under water you hear the motor over meters, so FOC is appreciate
Any hints to solve my problem are welcome :)
Thanks in advance
Georg