I am not sure if the problem I am having is hardware or FW related but I have seen it on three different controllers so I am guessing it is firmware.
During regen braking, when the motor current gets to some critical threshold, it seems that the ESC loses control and is no longer tracking the rotor position or electrical phase properly.
Running the motor on a dyno at fixed speed, I can see that as I brake harder and harder, all behaves normally until the braking torque gets to around 4.5 Nm. If I exceed that level of braking, the motor starts to get very jittery and the braking torque drops dramatically. I am adding some pictures to help show what I mean. The realtime graphs show braking torque being stepped up until loss of control.
Screen captures are with makerX Go-FOC H100 hardware and Vesc Tool 3.01. The controller FW is 5.3.
Around 4143 seconds is when control is lost.
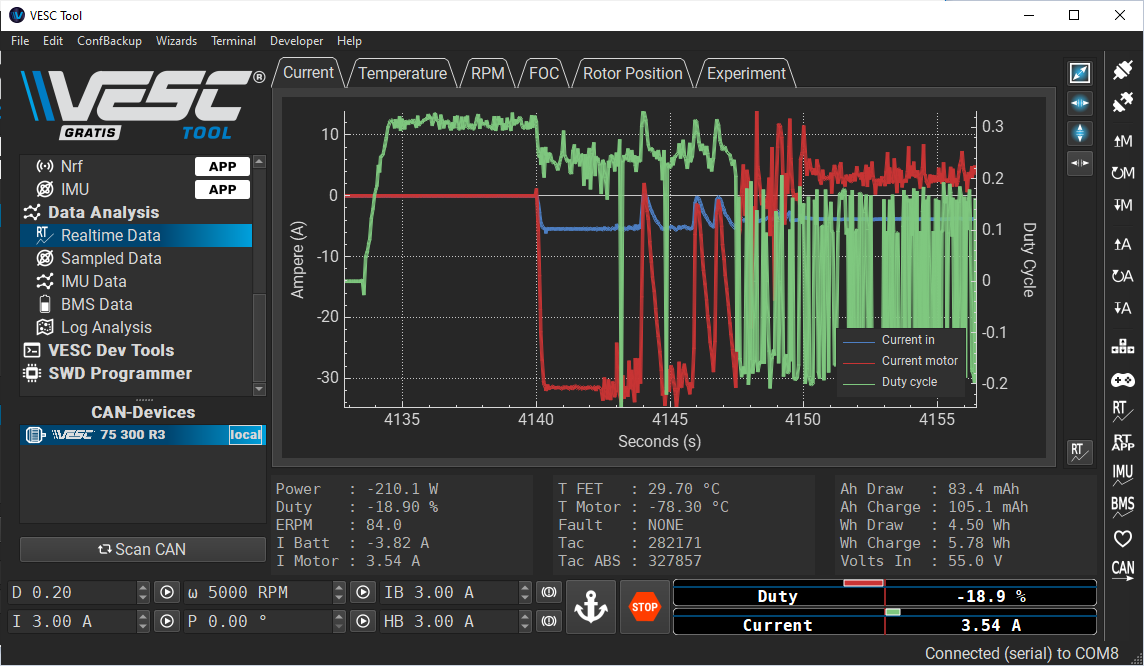

Here is the sampled data during the jittery operation.

I would like to be able to brake at much higher torque than this (at least double) without having the ESC lose control.
I have seen this same problem on Flipsky FSESC 7550 with 5.2 FW, Flipsky FSESC 75-100 with 5.2 FW, makerX Go-FOC H100 with FW 5.2, and makerX Go-FOC H100 with FW 5.3.
If anyone has any suggestions, I am open to them, but note that updating the flipsky controllers to FW 5.3 is not possible or not easy, anyway.
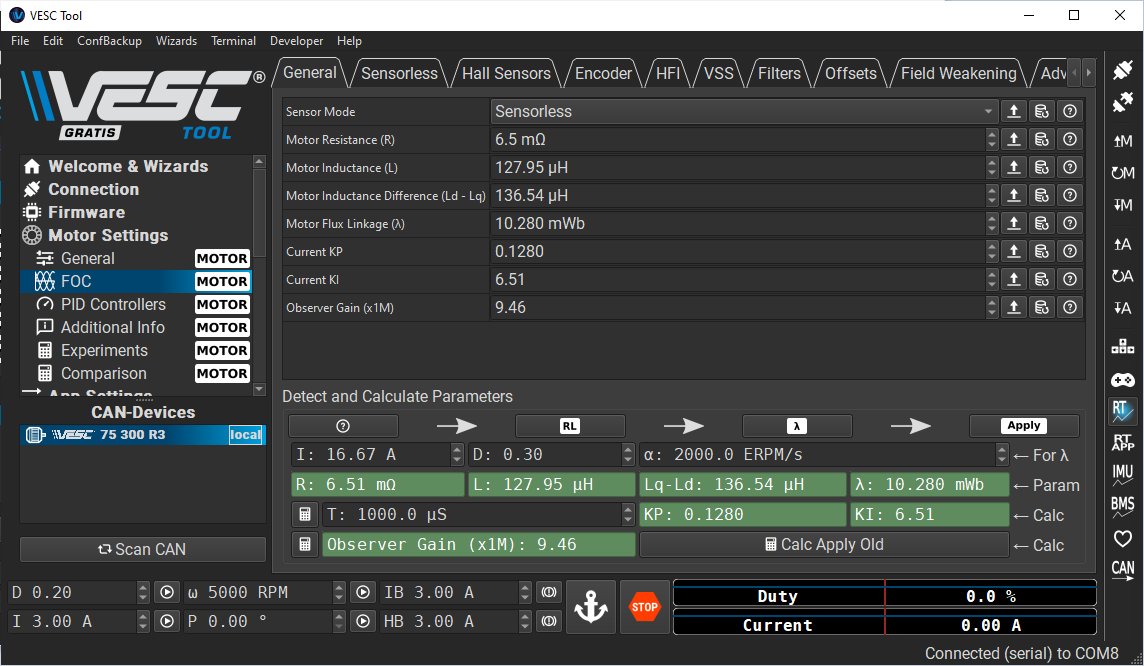
Maybe you need to manually tweak the motor parameters a bit. What is the motor you use?
It is a custom outrunner motor design with 10 magnetic pole pairs. Note that the motor works well in forward motoring application. I do not see any loss of control when forward motoring on the dyno or in real life (when installed on an e-bike). Much higher torque is possible. Do you have any guidelines or suggestions for which way to tweak the parameters? Up or down? Inductance first or flux linkage or resistance?
You can start with setting the time constant different. In Motor Settings FOC you will find in the lower section T:1000uS. Try 500 or 250 instead. The press Calc Apply Old and write the config. Carefully try the new setting, starting with low motor amp values and working your way up.