Hi,
I've loaded my motor with my dummyload so that a torque is required to perform startup.
When I command 90A of motor current, the motor remains stalled. Shoving the rotor results in the motor running leisurely at "only" 35A. IMHO, the VESC6 should be able to startup this motor from standstill in sensored mode. What do you think?
The load is not quite perfect at "constant torque" but pretty reasonable. The torque required to get things running (my shove) in this situation is quite small.
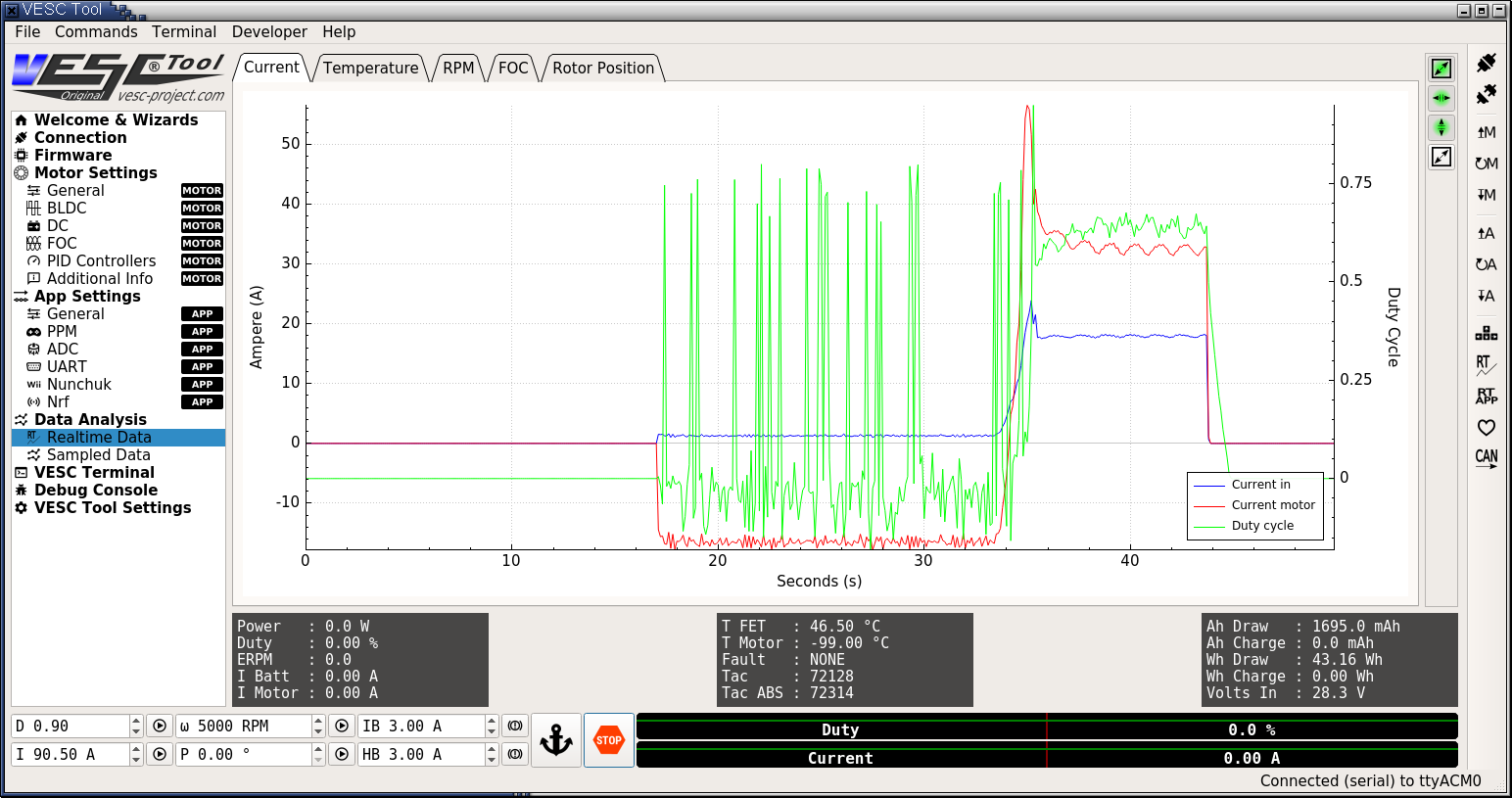
http://prive.bitwizard.nl/VESC6_90A.png
Here you see "idle", then commanded 90A current, then a shove that starts the motor and a few seconds of easy-running at just over 30A motor current.
{kind=link}
The odd thing that I'm seeing is that the motor current is reported negative. How could that be?
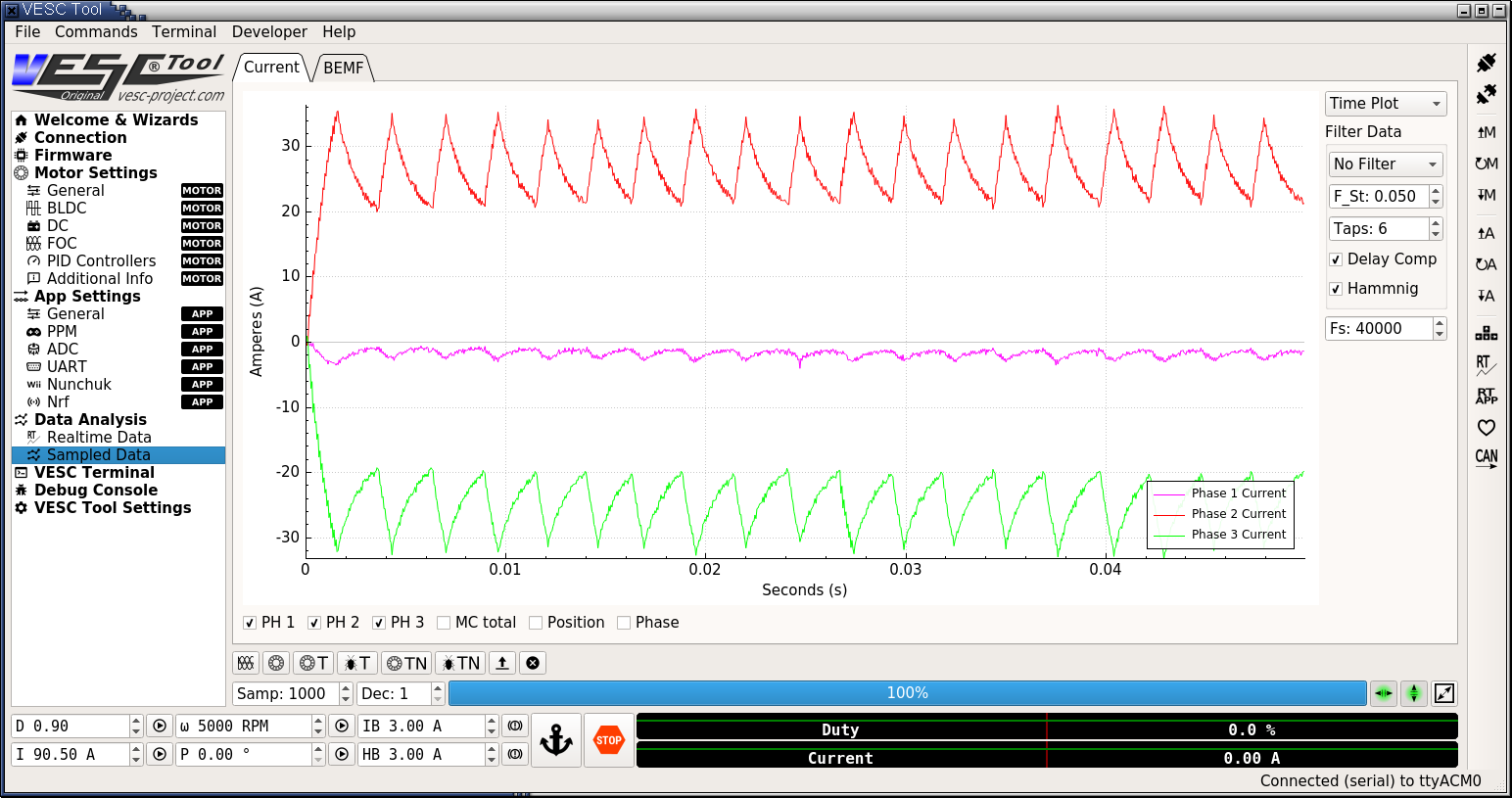
The current measured going through the phases is nowhere near the 90A commanded. The motor also makes funny noises when stalled like this.
http://prive.bitwizard.nl/VESC6_90A_currentplot.png
{kind=link}
(For my final application, the stalled-startup performance is VERY important)....
Yes, the input currentlimit is set to "18A" as I'm now running on my lab powersupply that has a 20A limit. But as you can see in the plot
http://prive.bitwizard.nl/VESC6_90A.png
the input currentlimit is not reached until the motor starts to turn. At the 28.3V that the supply is currently delivering the 18A limit amounts to 500W according to the VESC6 realtime display. Trying again, I just zoomed in on the "input current" and I can see that VESC6 detects a short burst of 2.2 peaking 2.6A, and then stabilizes at 1.1-1.6A input current.
The dummyload is not perfect. the load increases as the temperature goes up. So at the current setting, I can start the motor when things have cooled off, but after running a minute (you hear the RPM go down, see the motor current go up as things are in constant-power mode due to the battery current limit) the load is now just above the threshold and it doesn't want to start anymore.
OK. Benjamin: You were right. The "Max battery charge current" or rather motor current max brake. I have now set the motor current max brake to -90A and now it starts up under much higher load.
Still there seems to be a bug in that this stalled startup current is counted as being negative while in fact it is positive.
The weird thing seems to be after some more testing: The current is shown in "realtime data as negative" only happens WHEN it hits the "motor current max brake" limit.
So for testing: the steps to reproduce is to take a sensored motor, load it up a bit, and try to start it with the load, with the startup current higher than the max negative motor current... (i.e. if you load it so it requires 10A to start turning, then set the motor current max brake to 5A and try to start up. )
Spam here ^^