Thought to share my project here :)
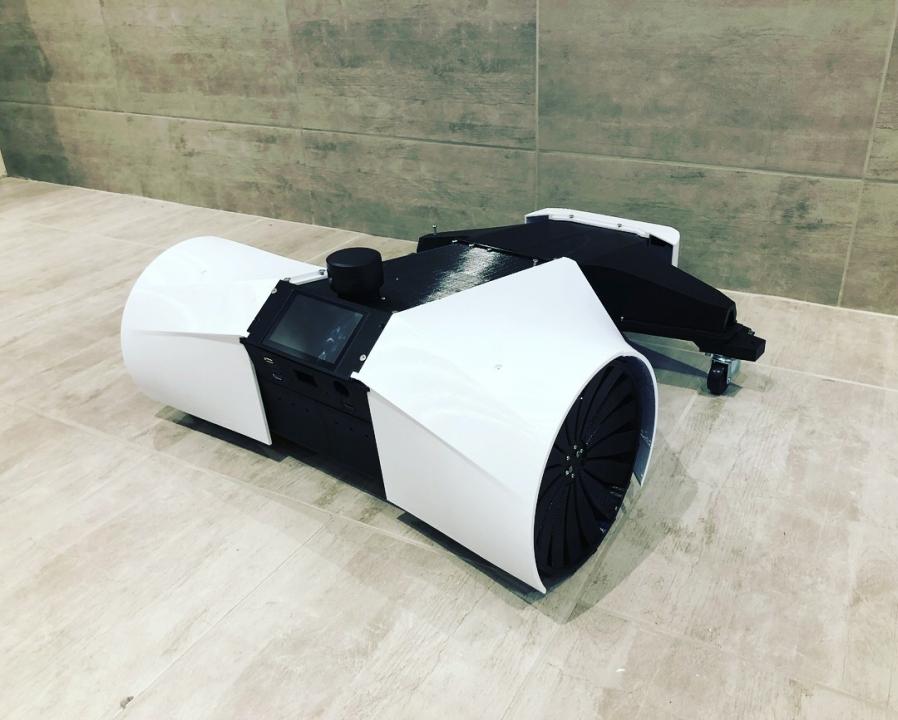
3D Printed Nvidia Jetson TX2 based robotic lawnmower running VESC for drive system.
The project has come a good way and I'm starting to post from where the project is today.
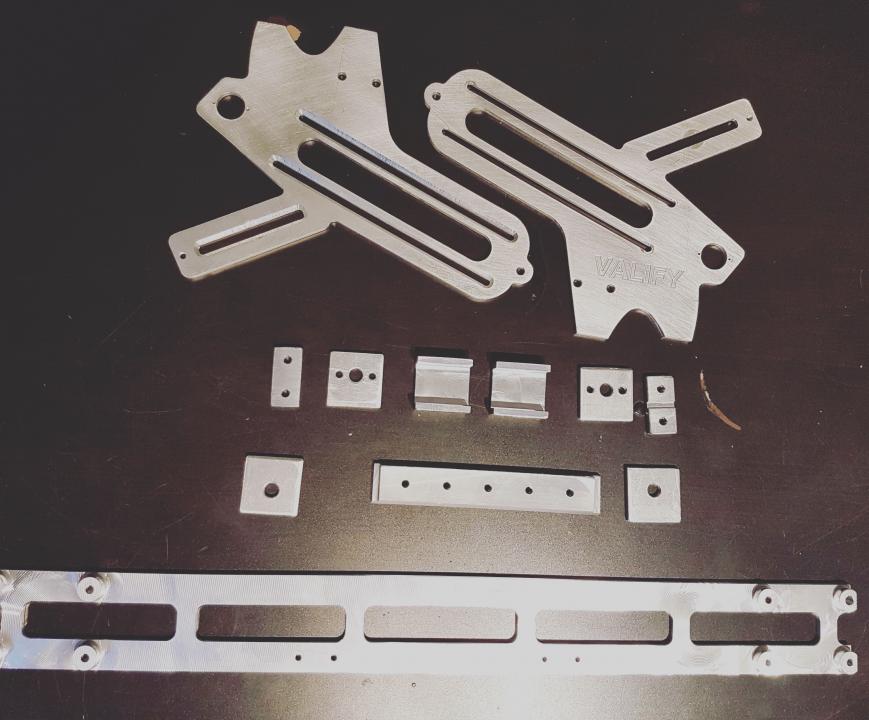
All parts for the drive system is completed.
Some parts will be welded together and then the assembly will begin next week!
Test assembly. The covers fits nicely! Not so many parts left to print! I need to order more filament!
Always appreciate feedback and ideas. Cheers!
Project update: Drive system assembly test. Everything fits perfectly. Some welding left and we are good to go
This weekend I have also started exploring the ROS world, sensor simulation, mapping and localization.
-3D world, robot and sensor simulation (360 degree LiDAR, depth camera)
-2D mapping with gmapping
-2D localization with amcl
-3D mapping with octomap
-3D localization with humanoid_localization
-3D mapping with RTAB-Map and octomap
-Flat world and non flat world
A successful first tests. I will have to spend some time digging down in each package and explore there possibilities. One problem for localization with an appearance based localization (example RTAB) is that small light changes dramatically effect the number of feature points.So in other words, because it's using the color 2D information of the pixels it's important the location looks always the same.
So when mapping outdoors I would love to hear what is recommended or what other people have find working good? As mention earlier I am running the ZR300 and sweep LiDAR.
3D localization with humanoid_localization (flat-world)
3D mapping with RTAB-Map and octomap (non-flat world) btw: the turtlebot is not really good driving outdoors
Follow the construction of the 3D Printed Jetson TX2 based Valify robotic lawnmower build
Nice to see your project! Good skills! Frank
So I have problem. The VESC ROS driver worked perfect for FW2.18. But after updating to FW 3.33 it does not. Looking at the /sensor/core Topic in ROS the values seems to be all messed up. Could someone please help me figuare out which bytes belongs to which in the https://github.com/mit-racecar/vesc/blob/master/vesc_driver/src/vesc_pac...
Many thanks for suggestions
Follow the construction of the 3D Printed Jetson TX2 based Valify robotic lawnmower build
I solved the problem by remapping the bytes.
https://github.com/raess1/vesc/blob/master/vesc_driver/src/vesc_packet.cpp
Follow the construction of the 3D Printed Jetson TX2 based Valify robotic lawnmower build
So the last days I have been busy. All parts for the drive system was completed and tonight I finished the first test assembly of the drive system. Its a lot of parts for this part of the project and a lot of things need to be correct in order for a nice run. It took a bit of time to get it right and it was a lot of tinkering.
Here is quick video spinning the wheels
https://www.youtube.com/watch?v=1KPyfEgN4iw
Follow the construction of the 3D Printed Jetson TX2 based Valify robotic lawnmower build
Those wheel axles look really long and really spindly. Why wouldn't you put the motors & ESCs in the pods you have been the center chassis and the wheels?
The Axles have bearings in both ends. Its not enough room in the wheel pods for the ability to gear it enough.
Testing drive system (VESC+ROS)
https://www.youtube.com/watch?v=BKspZaXUEzo
Follow the construction of the 3D Printed Jetson TX2 based Valify robotic lawnmower build