Hello,
I am using (somewhat modified) VESC on an unmanned aircraft. We are running a trampa mkvi hp and a 220kv brushless outrunner, sensorless. I've set the startup settings so that they limit startup current only, there's no open loop at all afaik. I've tested thousands of starts, stops and reversals on the ground, and have been building hours in the air on around 10 separate aircraft.
Everything has been going well, except we had one aircraft that ran into 2 startup failures in the air, on the same flight.
Logs show the ESC reporting 0 eRPM and ~7A q-axis current. This is weird because I've never ever seen 0 eRPM reported before when the motor is active - I did a ground experiment where I locked the rotor of the motor, and it still creates a rotating magnetic field at around 200 eRPM.
So, I'm wondering what could cause those symptoms.
Plots:
- red line is throttle demand, approximately equal to current demand
- green line is q-axis current
- blue line is mechanical RPM (motor is 7 pole pairs)
Here's a good startup: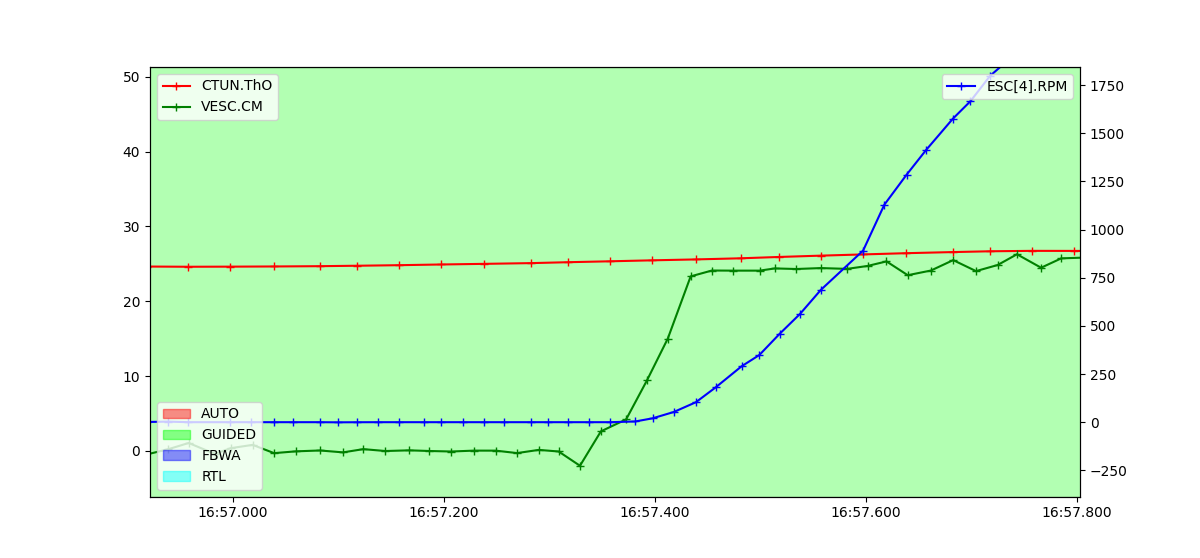
Here's the bad startup, several different zoom levels: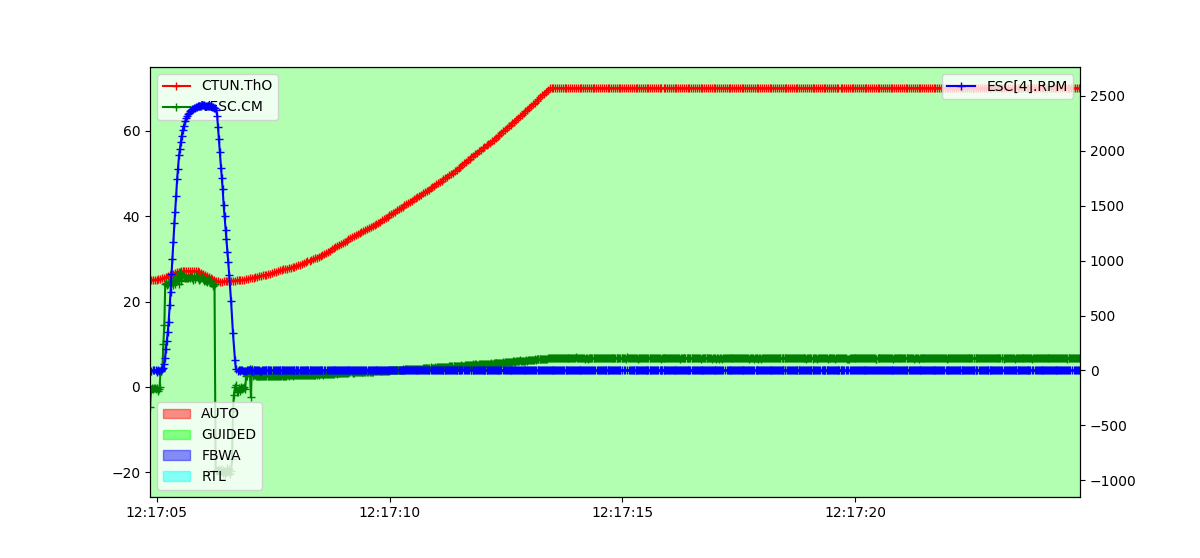
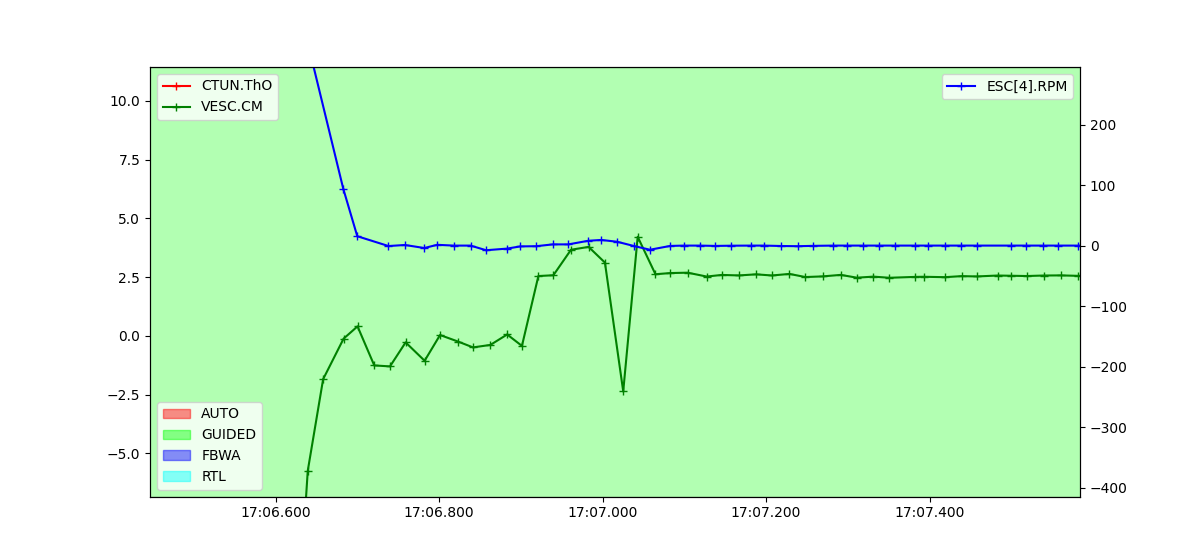
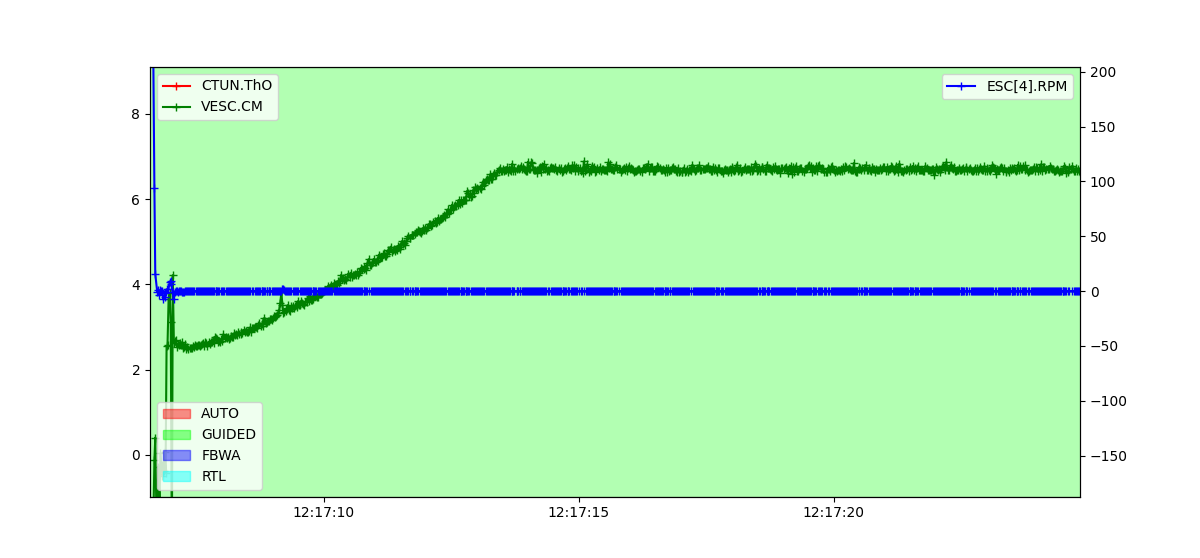
It concerns me that RPM reads exactly 0 because it suggests that maybe the openloop is getting stuck and overriding the phase at 0 RPM.