Hello All,
I have a large out-runner with an ABI encoder with "encoder ratio" of 21 and 9748 counts per revolution. I works fine at low RPM but for some reason at high RPM it becomes unstable and draws excess current. It only becomes stable ones the "Senseless eRPM" set to 40,000 is exceeded and FOC switches to senseless control, Does anyone know why my VESC (Fw v6.02, HW 60) can not operate at high eRPM in encoder mode? I figured ABI sensor must always be correct but there must be a reason why there is a need to switch over to senseless at some eRPM.
I want to used encoder to get precise RPM and I've measured the ABI signal with a logic analyzer and it looks good and clean.
Thanks,
Ben
Is your cable shielded, short as possible and not close to phase wires? Did you try: Motor->FOC-> Advanced->Speed Tracker Position Source: Corrected Position?
Link to forum post: VESC help offered for private persons and companies
Website: www.electricfox.de
My encoder cable is short and away from the phase cables but not shielded. I monitor/record the ABI signals using a logic analyzer and all the signals are clean and correct.
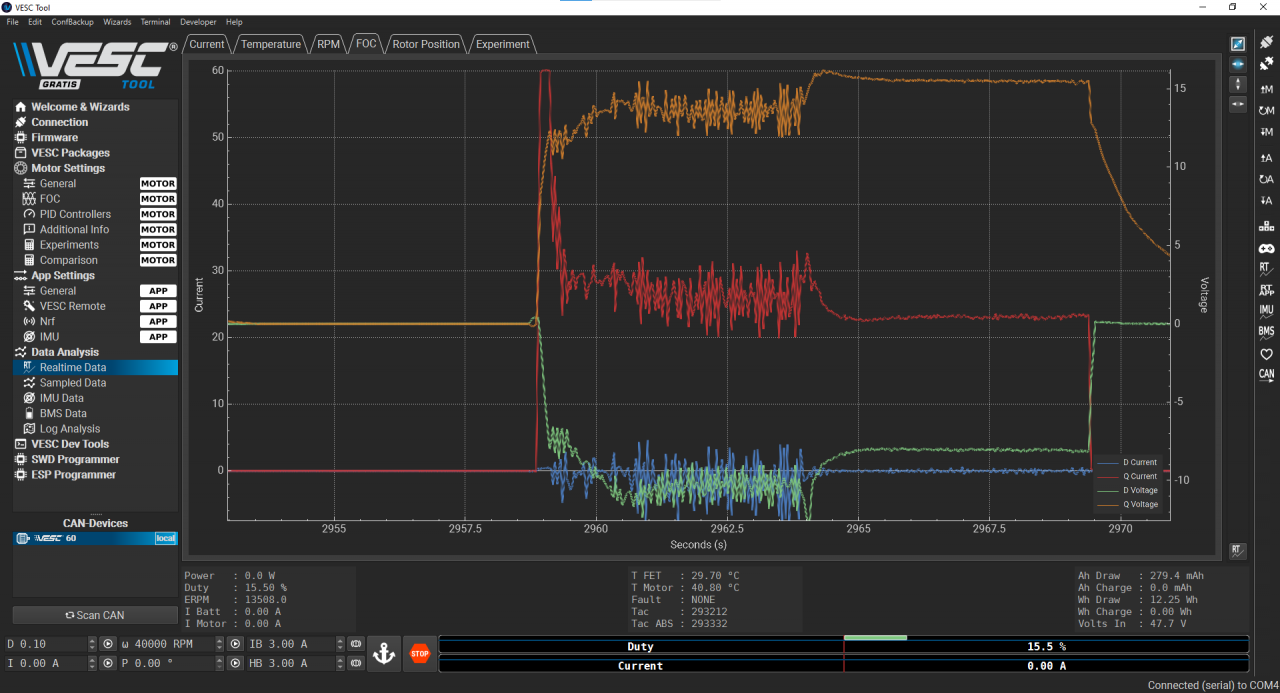
I completed a simpler test where the sensorless eRPM was set ro 10,000 and Duty cycle command of 0.3 was sent to ensure that it would switch to sensorless mode. The result (Fig 1) was current draw of ~7.5 Amps and Qvolt of 8V with eRPM of 21,000. If I repeat the same experiment with sensorless eRPM raised to 40,000 ensuring that it does not transition to sensorless mode, the current draw is 22 Amps and Qvolt of 4V with eRPM of 17,000. What can be causing my VESC to operate so differently just by switching from Encoder to sensorless? Wouldn't rotor angle from Encoder be more accurate than from any Observer? I'm going to see if I can repeat the test using current command to see if I can confirm that the difference to just the current control loop.