Hello,
I am using the Spintend VESC 75/100 v1 (FW 5.3) on an escooter.
I drive the VESC with an ESP32 APP with CAN bus. It uses the COMM_SET_CHUCK_DATA message at 30Hz to give orders (so, little delay).
It works really great... except one thinkg (sometimes scary) : when I press full brake, it never react the same way.
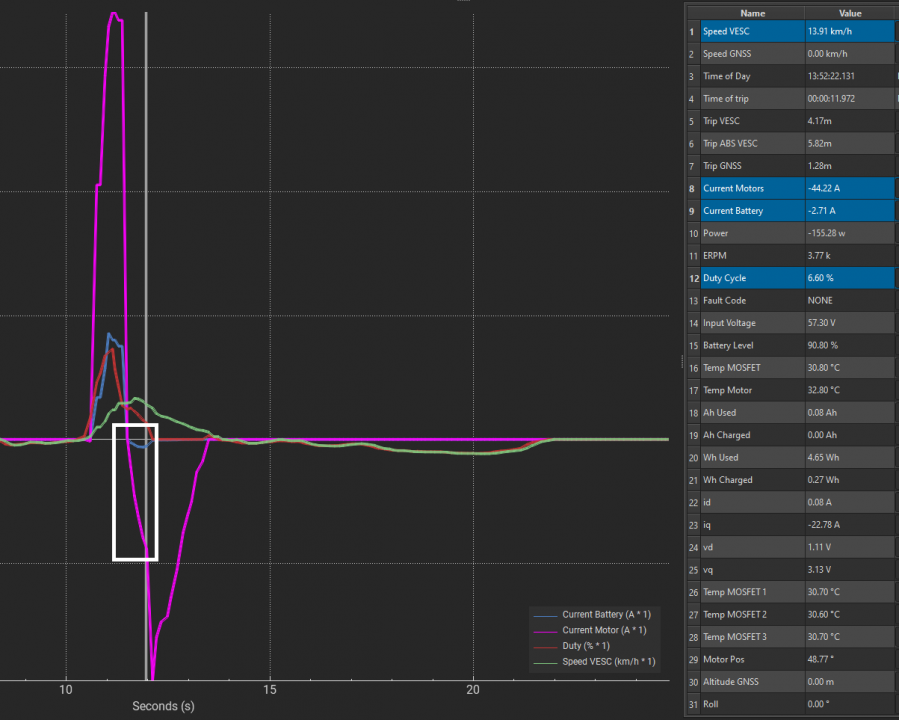
Sometimes, it brakes strongly & instantly, sometimes, there is a delay (~200-500ms) with really low braking force (even if brake is pressed at max during this time), then it apply full braking force.
No error message
Main config :
- 120A / -80A motor
- 160A abs max- 50A / -25A bat
I catched the event in the logs :
Those are small motor hubs (given for 80A motor at detection).
I tried :
- saturation compensation at 15% : no real difference
- changing sensorless erpm switch : 350 => 5000, no effect (and the current test is at 4500 erpm max).
- changing pos/neg rampup times : 0 <-> 0.5s, weird effects
- reducing motor current to 80A (instead of 120A) : no effect
Another strange thing, very often, the first braking is hard, the next is soft...
Any idea what could be wrong ?
Thanks !
Full config :
https://koxx3.fr.eu.org:8086/app.xml
https://koxx3.fr.eu.org:8086/motor.xml
Full log :
https://koxx3.fr.eu.org:8086/2022-10-22_15-52-09.csv