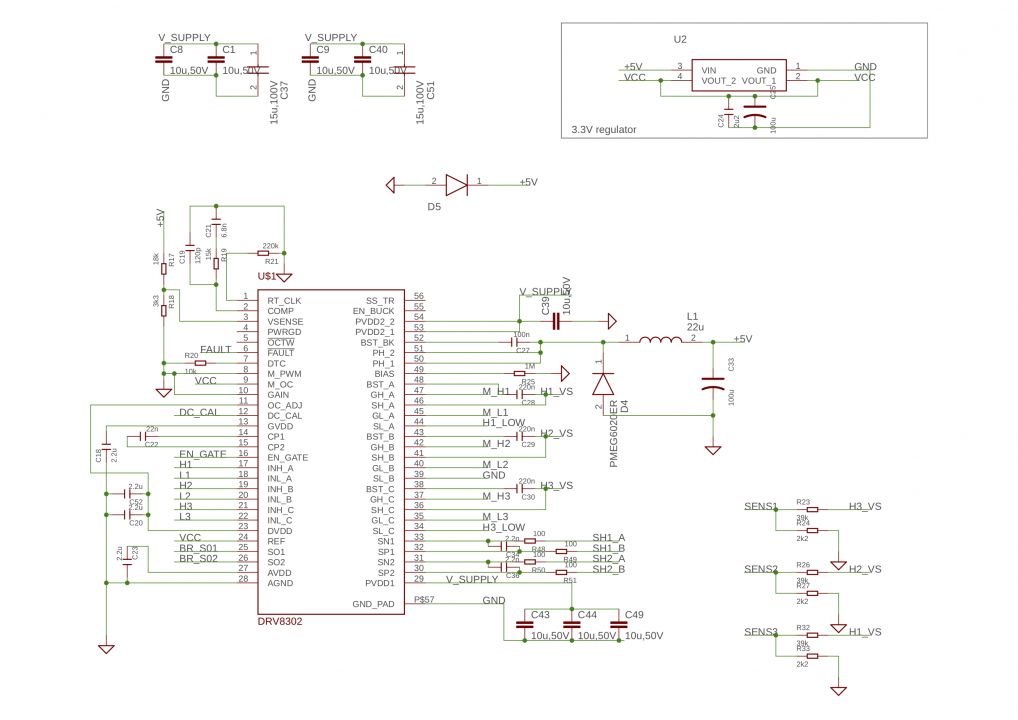
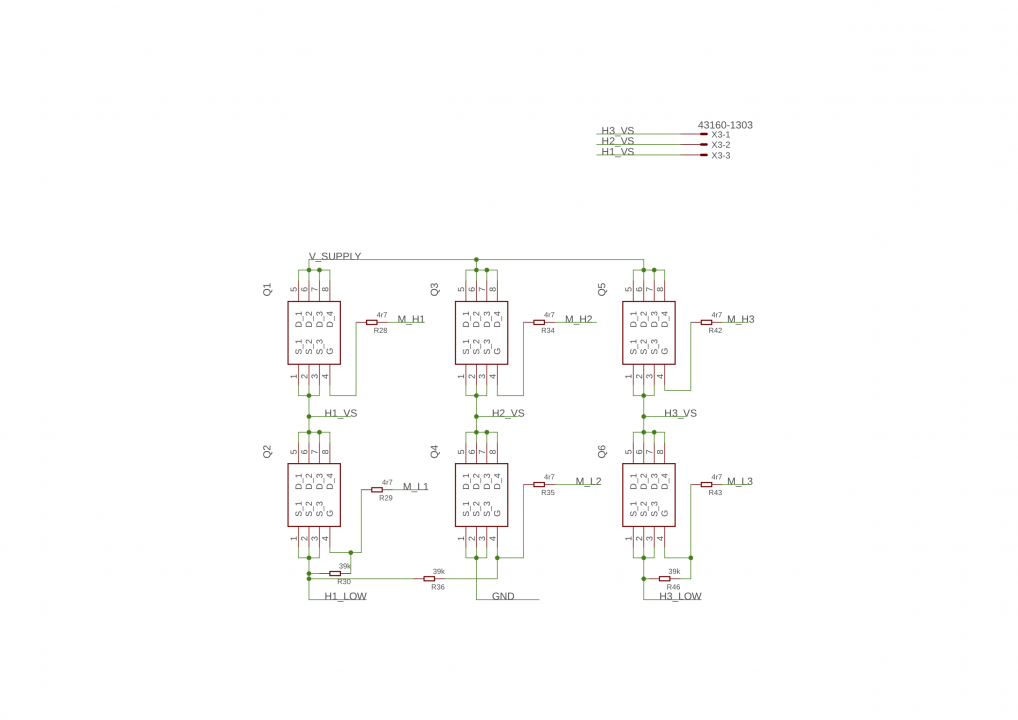
I'm in the process of designing my own dual motor vesc. Currently it is just a slightly modified copy of the VESC4 copied twice on a single board and with NTMFS5C645NL fets, instead of IRFS7530. Also the PWR_COMM and servo output have been removed.
I was able to program the board correctly and everything seems fine in the Vesc-tool. A problem occurs when I'm trying to drive a motor. When pressing a key forward/backward/left/right or sending a current or speed command to the vesc, I hear a loud bang from the motor, like it is trying to start up and than immediately being halted. Also the red light blinks and the Vesc is indicating a low voltage error. I'm getting the idea that there is a short circuit when driving the motor. I've set the max amps to 5 amp and the max battery amps tot 5 amp as well.
Even though the amps are set quite low, after a while one of the fets blew up and needed replacement. What could be the issue, and how could this be resolved?
When I'm not driving the motors the fets don't get warm and the current draw is <100mA so that should be fine. It is just when driving the motors that the error occurs. This is on both the motor controllers.
Well a day of trials later and still no success. However after resoldering a couple of fets namely Q3 and Q4, where I think only Q3 was broken, and the DRV8302, I can drive the motor a little bit. But it halts when applying a little force, going into over current. The current limits are +/-30Amps for the motor and +/-20amps for the battery. The motor I'm using is a hoverboard wheel.
This are some screenshots of what happens when the motor is spinning:
Here the erpm seems to be detected ok, and kept at a constant speed.
But looking at the current graph doesn't give a good image.
Looking at one of the phases gives me the above result. This is the same for all phases.
Does anyone know what the problem could be?
It may have been that I have swapped the SENSE or pins. Currently SENSE1, SENSE2, SENSE3 are connected to pin16, 15, 14 on the mcu, is this correct? And if not how can this easilly be changed in the software?
This is the correct wiring as of VESC6 firmware for using external gate drivers.
Thanks but I'm using a VESC4 with DRV8302 driver.
I got a wheel to spin today, but it sounded really janky and when I tried to accelerate quickly it stalls. Also it keeps ~95% duty cycle even when no sending any commands as I get above 50% dutycycle.